5
Определение подачи зубчатых гидромашин
б) двумя сплошными линиями контакта в двух точках зацепления,
что возможно при касании зубчатых колес более чем в одной точке,
другими словами, при наличии в механизме пассивных связей, причем
связи могут быть постоянными и периодически возникающими.
За выделенными указанными способами полостями оставим назва-
ние «камера», хотя в общем случае эти полости могут включать в себя
несколько рабочих камер, т. е. сумма объемов ∑
V
р.к.
В целях сокращения
далее камеры, образуемые согласно пункту 3а (с одной линией контакта),
будем называть камерами первого типа, а камеры, формируемые по
пункту 3б (с двумя линиями контакта), — камерами второго типа.
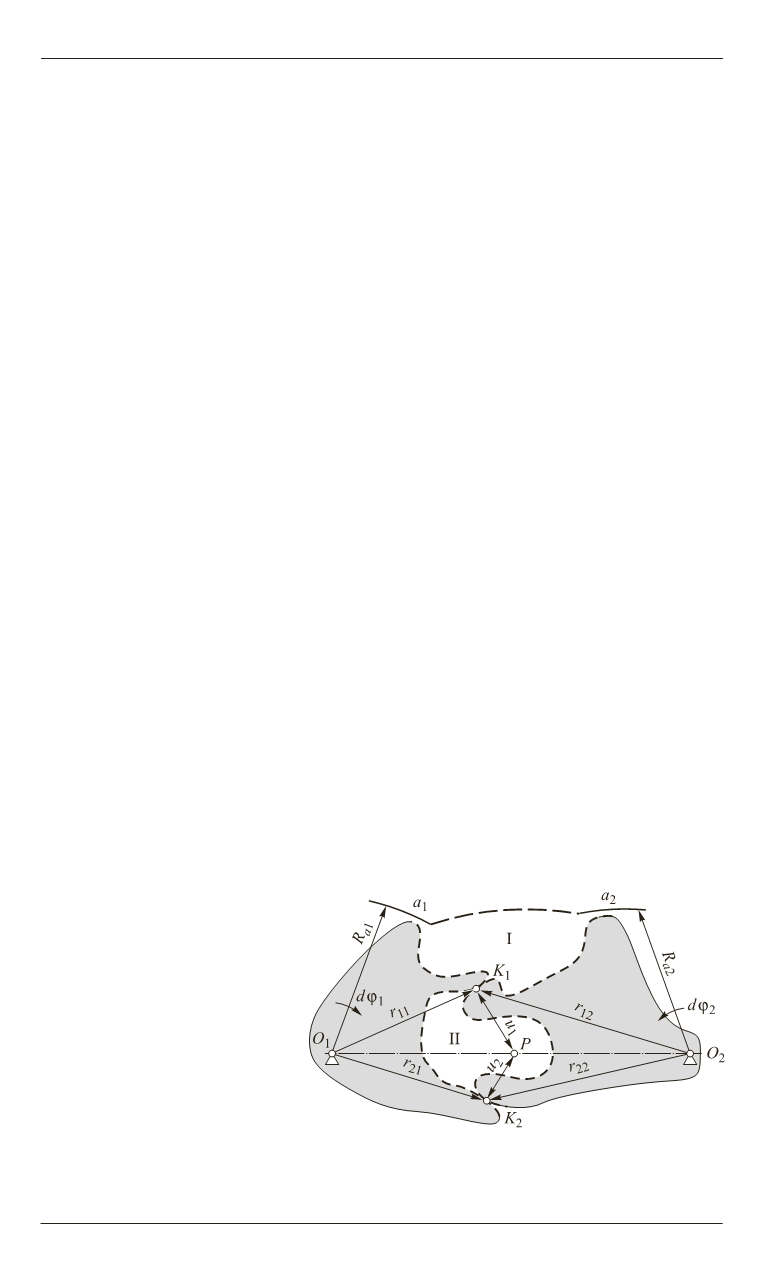
В качестве иллюстрации этих положений на рис. 3 схематично изо-
бражены элементы зубчатой гидромашины с внешним зацеплением без
конкретизации их геометрической формы и вида профиля зубьев, что
лишний раз подчеркивает общий характер получаемого результата. Гер-
метичность камеры I обеспечивается сплошной линией контакта в точ-
ке зацепления
K
1
и касанием выступов зубьев диаметрами
a
1
и
a
2
с
поверхностями расточек корпуса радиусами
R
a
1
и
R
a
2
— камера перво-
го типа. Герметичность камеры II обеспечивается двумя линиями кон-
такта в точках зацепления
K
1
и
K
2
— камера второго типа.
Изменение (уменьшение) объема камер как первого (
dV
I
), так и вто-
рого (
dV
II
) типов обусловлено перемещением цилиндрических поверх-
ностей, которые принадлежат колесам
1
и
2
при их повороте на углы
d
φ
1
и
d
φ
2
. Для камеры первого типа эти поверхности ограничены радиусами
R
а
1
,
r
11
первого колеса и
R
а
2
,
r
12
второго колеса, для камеры второго ти-
па — радиусами
r
11
,
r
21
первого колеса и
r
12
,
r
22
второго колеса:
2
2
2
2
I
1 11 1
2 12
2
2 2
2 2
II
11 21 1 12 22
2
(1/ 2) (
)
(
)
;
(1/ 2) (
)
(
)
,
a
a
dV
B R r d R r d
dV
B r r d r r d
(2)
где
В
— ширина зубчатых колес.
Выразим переменные
величины, входящие в (2),
через параметры, характе-
ризующие любую зубча-
тую передачу (см. рис. 1):
межцентровое расстоя-
ние
А
=
О
1
О
2
=
О
1
Р
+
О
2
Р
,
передаточное отноше-ние
i
и удаленность точки за-
цепления
K
от полюса
Р
— расстояние
KР = u
.
Рис. 3.
Схема образования камер в зубчатых
гидромашинах с внешним зацеплением:
I, II — камеры


