Ключевые вопросы создания интеллектуальных мобильных роботов
9
а
б
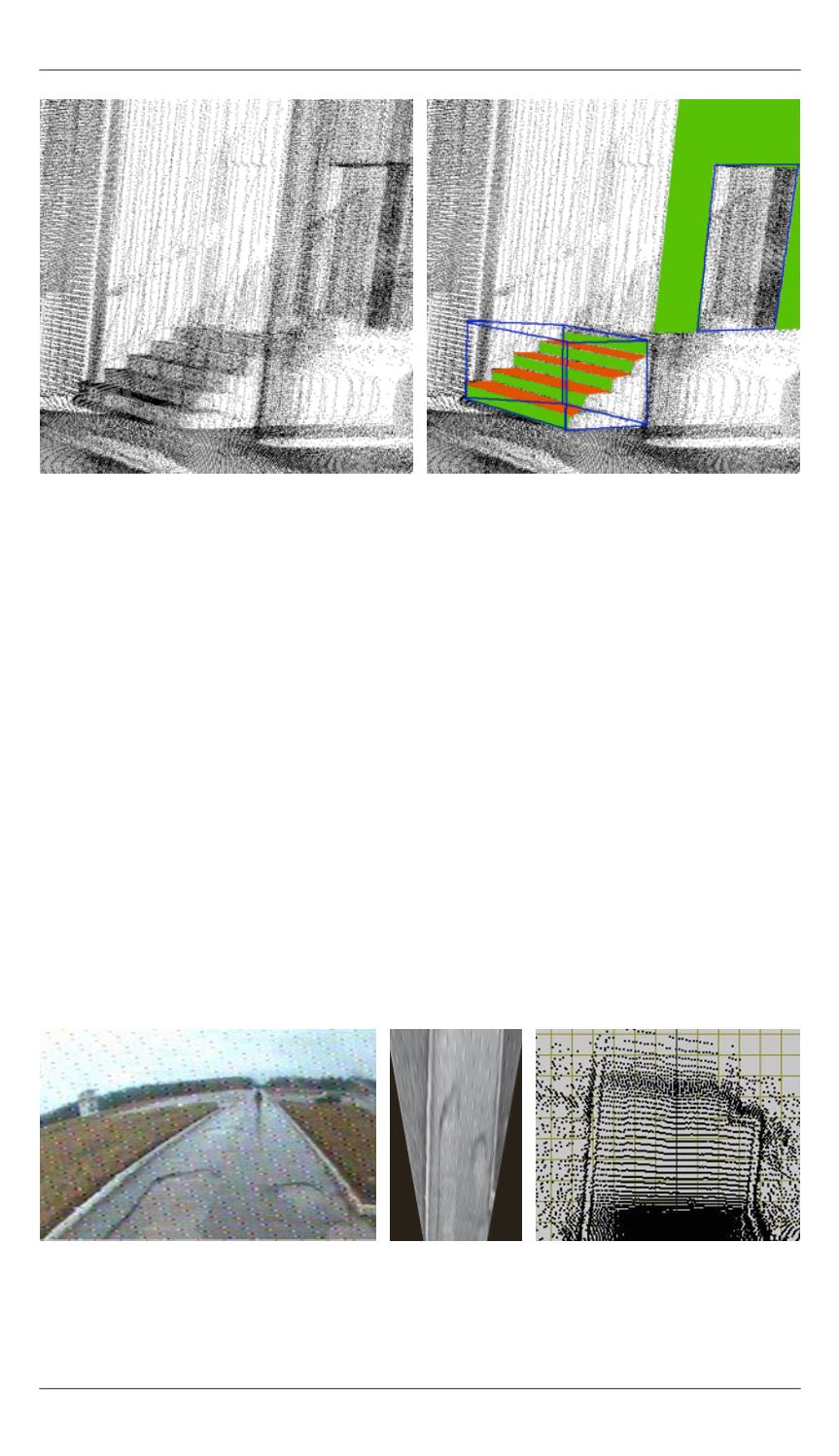
Рис. 8.
Пример перехода к семантическому описанию локальной зоны:
а
— исходное 3D-изображение;
б
— выделенные объекты
Перспективным направлением развития является комплексирование
различных сенсоров: видеокамер, сканирующих лазерных дальномеров
(в том числе с различной и даже переменной длиной волны, что позво-
ляет дистанционно определять состав опорной поверхности), радио-
локаторов, тепловизоров и т. д. Например, комплексирование видео-
и дальнометрических изображений позволяет:
●
формировать объемные визуально-подобные модели внешней
среды [5], которые могут успешно использоваться не только для управ-
ления МР и его навесного оборудования, но и для планирования раз-
личных спецопераций [10];
●
более качественно решать навигационную задачу [11];
●
более качественно решать задачу распознавания дорожной сцены
и управления МР при движении по сети дорог [4].
а
б
в
Рис. 9.
Комплексная обработка видео- и 3D-изображений дорожной сцены:
а
— исходное видеоизображение;
б
,
в
— преобразованные видео- и дальнометри
ческое изображения


