Ключевые вопросы создания интеллектуальных мобильных роботов
5
соответствующие смежным вершинам расстояния в плоскости пере-
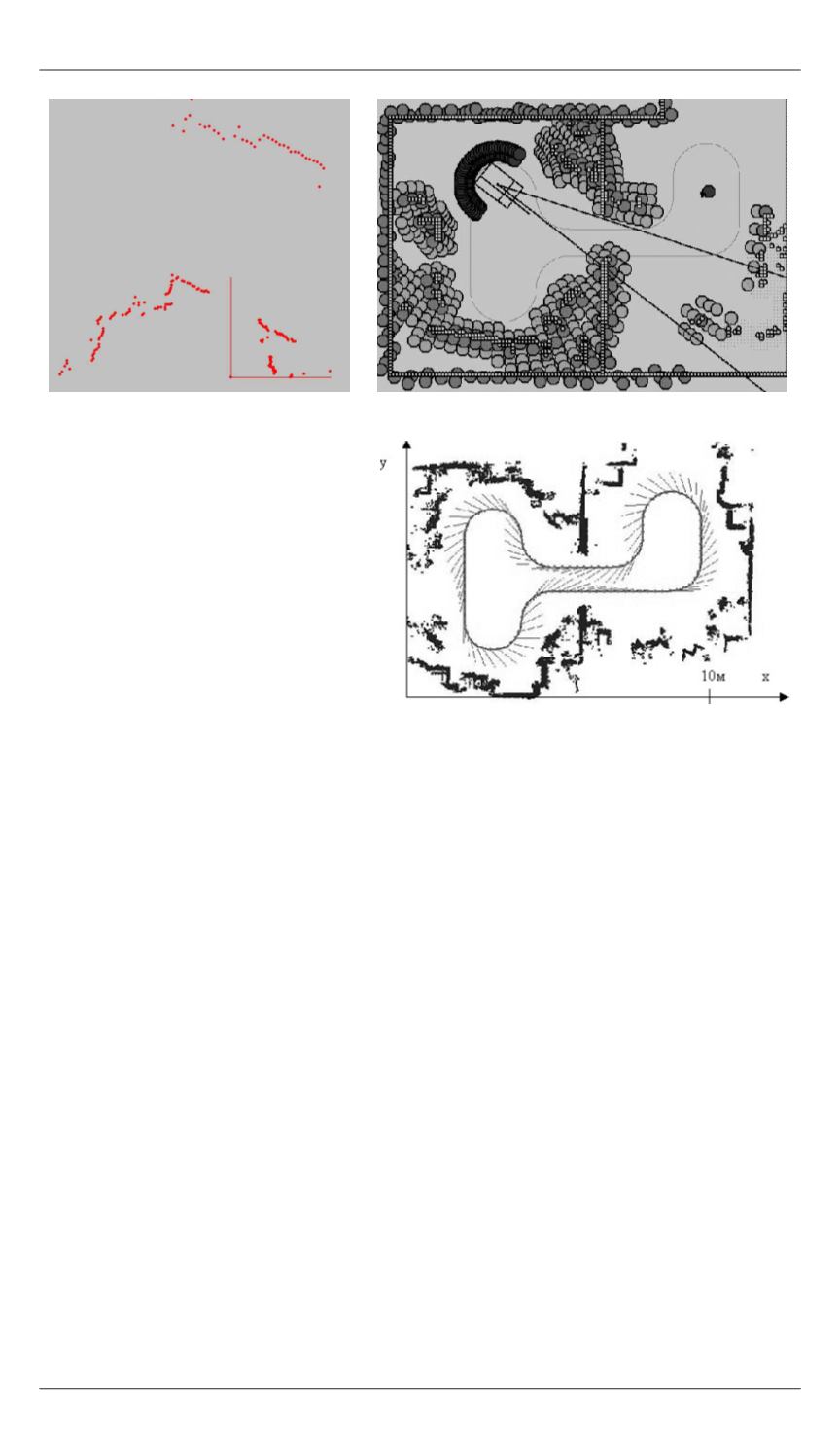
мещений). Результаты работы АСУД в цеховых условиях приведены
на рис. 4, а в естественной среде — на рис. 5.
Планирование тактической траектории выполняется на тактической
модели, представляемой в виде глобального графа, который автомати-
чески строится по КБД с учетом начального (текущего) и целевого по-
ложений МР [7]. Исходными данными для формирования КБД является
цифровая карта района маневрирования и потенциальные возмож-
ности МР.
В настоящее время построены примеры КБД для индустриальной
среды, города, сети дорог и пересеченной местности. Они интегриро-
ваны в бортовые системы управления действующих МР и прошли экс-
периментальную проверку в реальных условиях. Глобальный граф
в процессе функционирования МР должен по мере необходимости кор-
ректироваться автоматически по данным СТЗ и навигационной системы
[7]. При обнаружении не учтеного в КБД непроходимого препятствия
(например, перекрыта дорога, разрушен мост) оно в соответствии с те-
кущими координатами вносится в память. При этом корректировка гло-
бального графа сводится к добавлению или исключению вершин и дуг
в исходном графе (исключаются вершины и дуги, принадлежащие
а
б
в
Рис. 4.
Результат работы АСУД
цехового МР концерна VOLVO:
а
—
2D-изображение внешней
среды;
б
— формальная модель
и 1-й шаг траектории;
в
— прой-
денная траектория и сформиро-
ванный план цеха


