В.П. Носков, И.В. Рубцов
4
при круговом обзоре. При движении по дорогам [4] и для формирования
объемных моделей внешней среды [5] необходимо использовать ком-
плексированные СТЗ, построенные на базе лазерных сенсоров и видео
камер (см. рис. 3,
в
,
г
).
По дальнометрическим изображениям в соответствии с законами
сканирования, а также с учетом угловых и линейных перемещений МР
строится геометрическая модель внешней среды. Затем выполняется
классификация данной геометрической модели по критерию проходи-
мости с учетом кинематических и динамических характеристик данного
объекта управления и строится формальная модель внешней среды [6].
Формальная модель представляется в виде плоского однородного графа
или графа со взвешенными ребрами и может быть использована для
нахождения локальной траектории движения, безопасной для данного
объекта управления. Задача поиска локальной траектории сводится
к нахождению в этом графе связной последовательности вершин и ре-
бер, принадлежащей разрешенной для движения зоне и удовлетворяю-
щей какому-либо критерию (например, критерию минимума суммы
весов ребер, входящих в последовательность, что соответствует нахож-
дению кратчайшей траектории, если в качестве весов ребер приняты
а
в
б
г
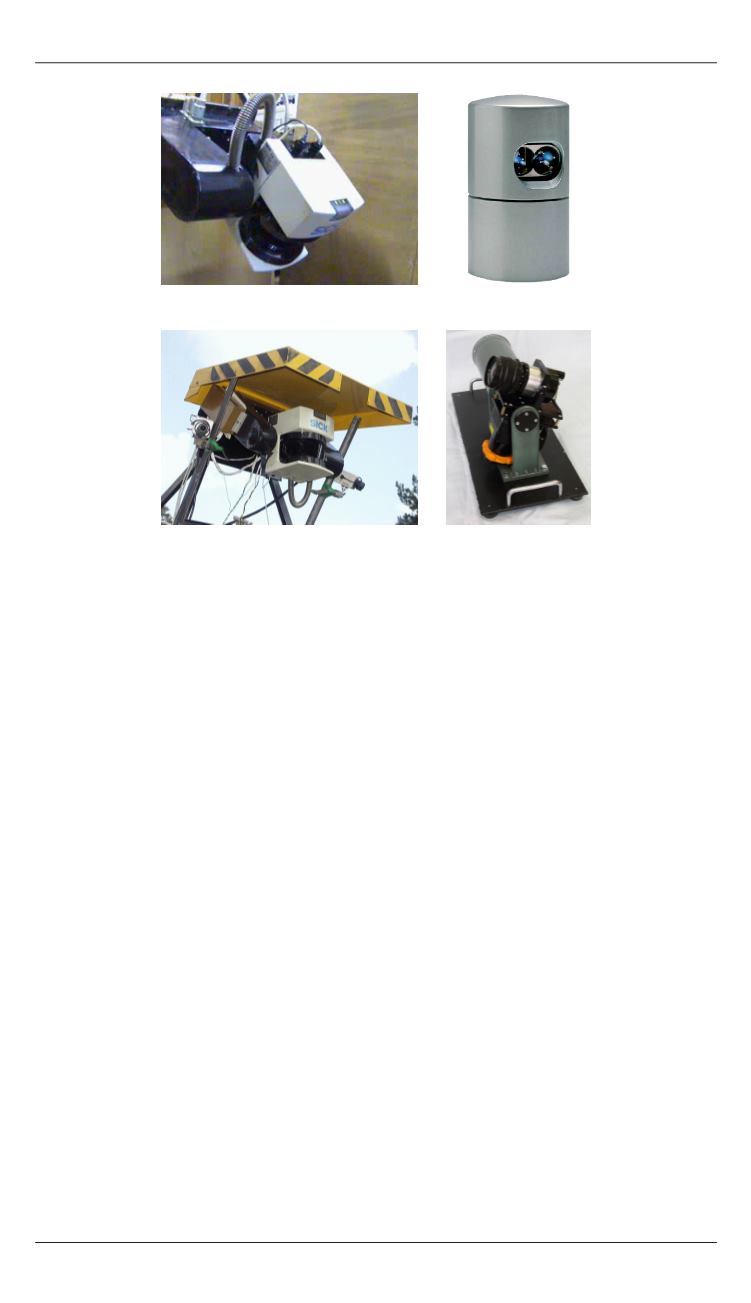
Рис. 3.
Системы технического зрения для автономного вождения:
а
— 3D-лазерный сенсор на базе 2D-лазерного сенсора SICK и сканатора;
б
— 3D-лазерный сенсор HDL-32E;
в
— 3D-лазерный сенсор и 2 видеокамеры;
г
— 2D-лазерный сенсор, видеолинейка и сканатор


