В.П. Носков, И.В. Рубцов
6
и проходящие через обнаруженное препятствие, добавляются новые
вершины и дуги, соответствующие обнаруженному препятствию).
На рис. 6 демонстрируется использование глобального графа для на-
хождения траектории и ее корректировка по данным СТЗ при автоном-
ном движении в индустриальной среде (утолщенные ломанные ли-
нии — спланированные глобальные траектории, заштрихованный объ-
ект — обнаруженное СТЗ препятствие).
Навигационную систему МР целесообразно создавать на основе
комплексирования средств спутниковой навигации, инерциальных
и одометрических подсистем. Кроме того, в экранированных зонах (зда-
ния, плотная городская застройка, ущелья) необходимо применять ме-
тоды экстремальной навигации по дальнометрическим изображениям
внешней среды [8]. Результат работы такой навигационной системы
приведен на рис. 4,
в
, здесь по последовательности 2D-изображений
(см. рис. 4,
а
) определены ориентация и координаты МР, которые со-
впали с магнитопроводом, по которому он двигался, и сформирован
план цеха. Комплексное использование различных систем и методов
навигации позволяет достоверно решать навигационную задачу борто-
выми средствами при функционировании МР в условиях пересеченной
местности, города и индустриальной среды.
Исполнительная система представляет собой комплекс следящих
приводов, обеспечивающих отработку локальных траекторий при воз-
а
в
б
г
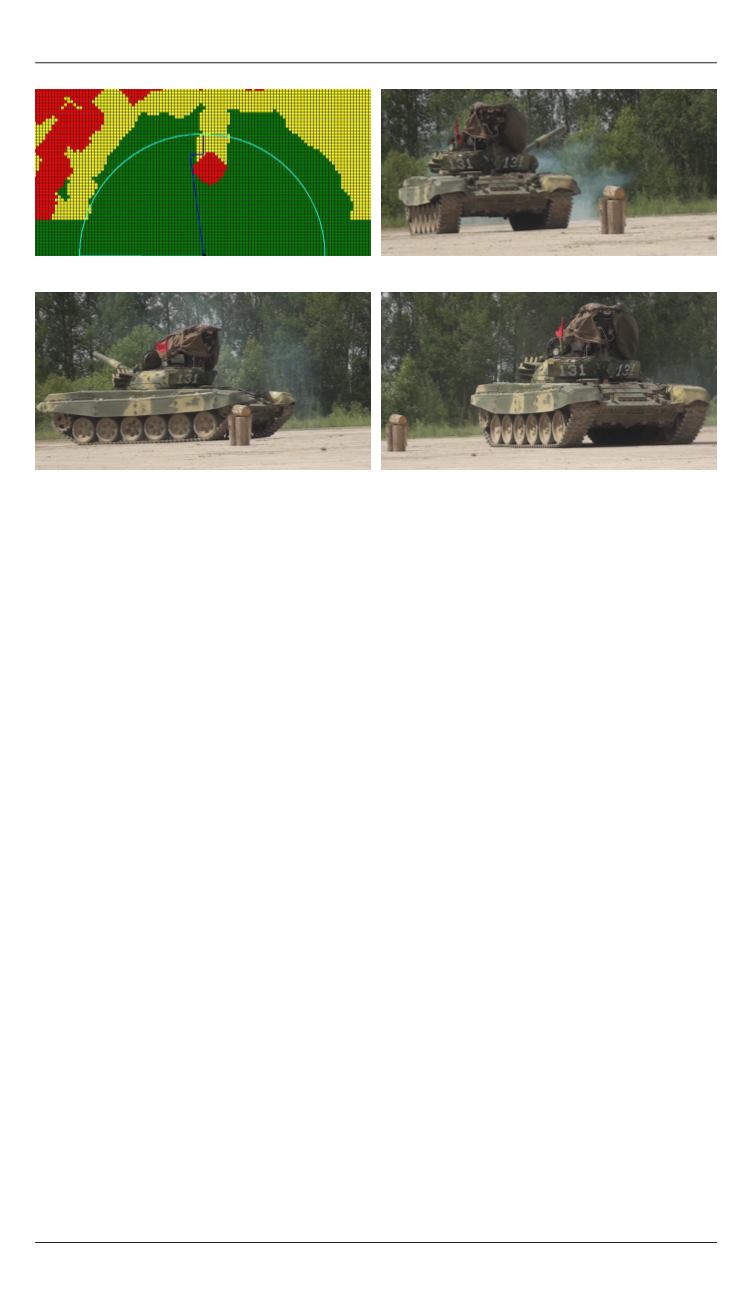
Рис. 5.
Результат работы АСУД в естественной среде:
а
— формальная модель внешней среды и 1‑й шаг траектории;
б
–
г
— отработка
траектории обхода препятствия


