Ключевые вопросы создания интеллектуальных мобильных роботов
3
Рассмотрим принципы построения основных подсистем АСУД
и продемонстрируем их работу.
СТЗ является источником основного объема необходимой для обе-
спечения автономного движения информации и представляет собой наи-
более сложную систему. Создано несколько СТЗ на базе 2D- и 3D-лазер
ных сенсоров, сканаторов, видеолинейки и видеокамер (рис. 3).
В зависимости от среды функционирования и решаемых задач ис-
пользуют те или иные СТЗ. В цехах и в урбанизированных средах
достаточно использовать 2D-лазерный сенсор типа SICK, который дает
дальнометрические изображения в виде горизонтальных сечений рабо-
чей зоны [1]. На пересеченной местности и в подвергшихся разруше-
ниям индустриально-городских средах, а также при движении в зданиях
по лестницам следует применять 3D-лазерные сенсоры, которые дают
объемные дальнометрические изображения внешней среды в телесных
углах обзора [2, 3]. На малых скоростях можно использовать
3D-лазерный сенсор на базе 2D-лазерного сенсора типа SICK и одно-
степенного сканатора (см. рис. 3,
а
), позволяющий получать около
13,6 тыс. измерений в секунду. На больших скоростях необходимо при-
менять более быстродействующие сенсоры, например HDL-32E LiDAR
(см. рис. 3,
б
), позволяющий получать 700 тыс. измерений в секунду
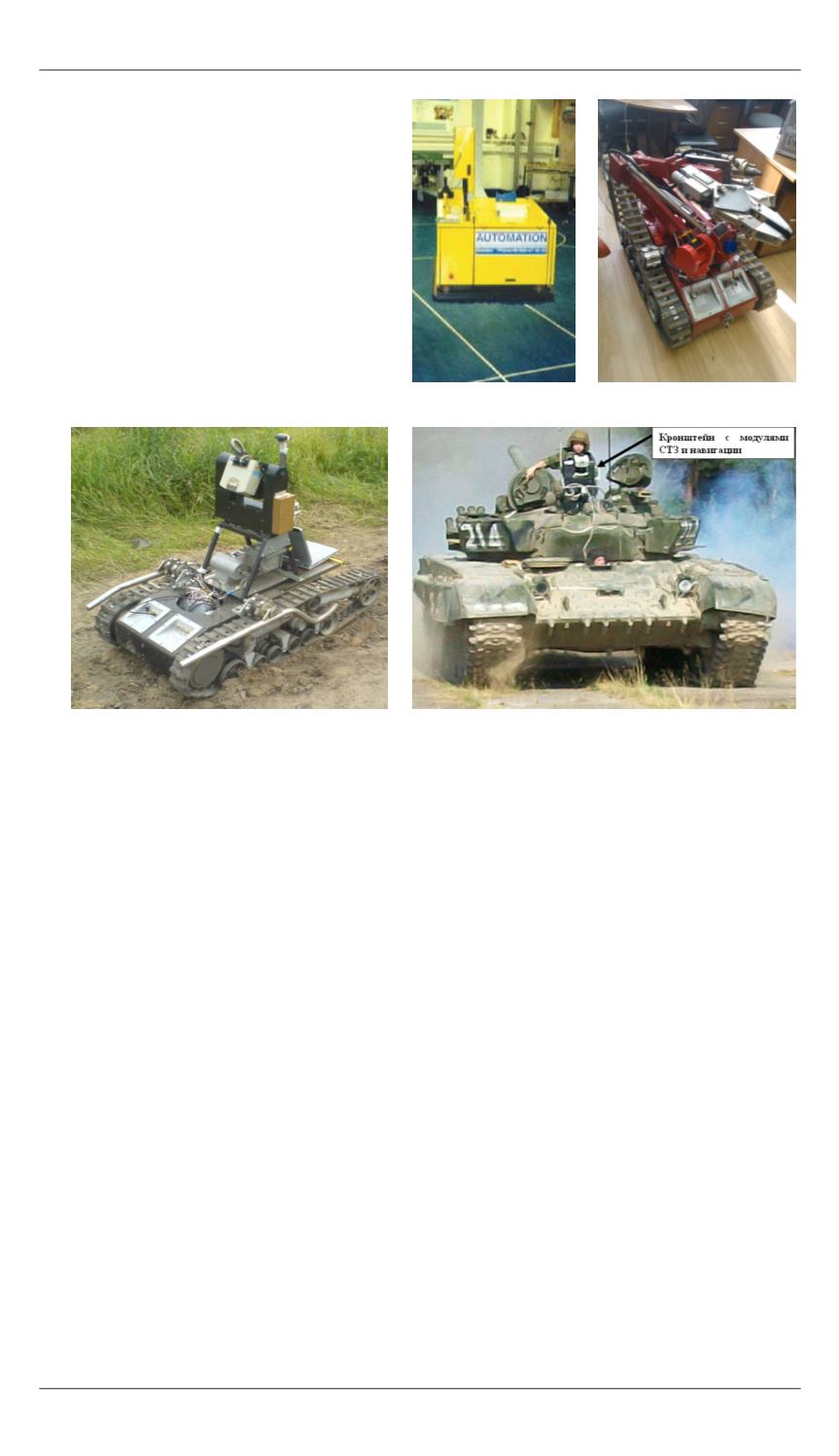
Рис. 2.
Образцы МР
с автономными системами
управления движением:
а
—цеховойМР концерна VOLVO;
б
—МР, принятый на вооружение
МЧС;
в
— экспериментальный МР
массой 170 кг;
г
— эксперимен-
тальный МР массой 45 т
а
б
в
г


