














 6 / 12
6 / 12

Д.С. Вдовин, И.В. Чичекин, Т.Д. Поздняков
6
Инженерный журнал: наука и инновации
# 8·2017
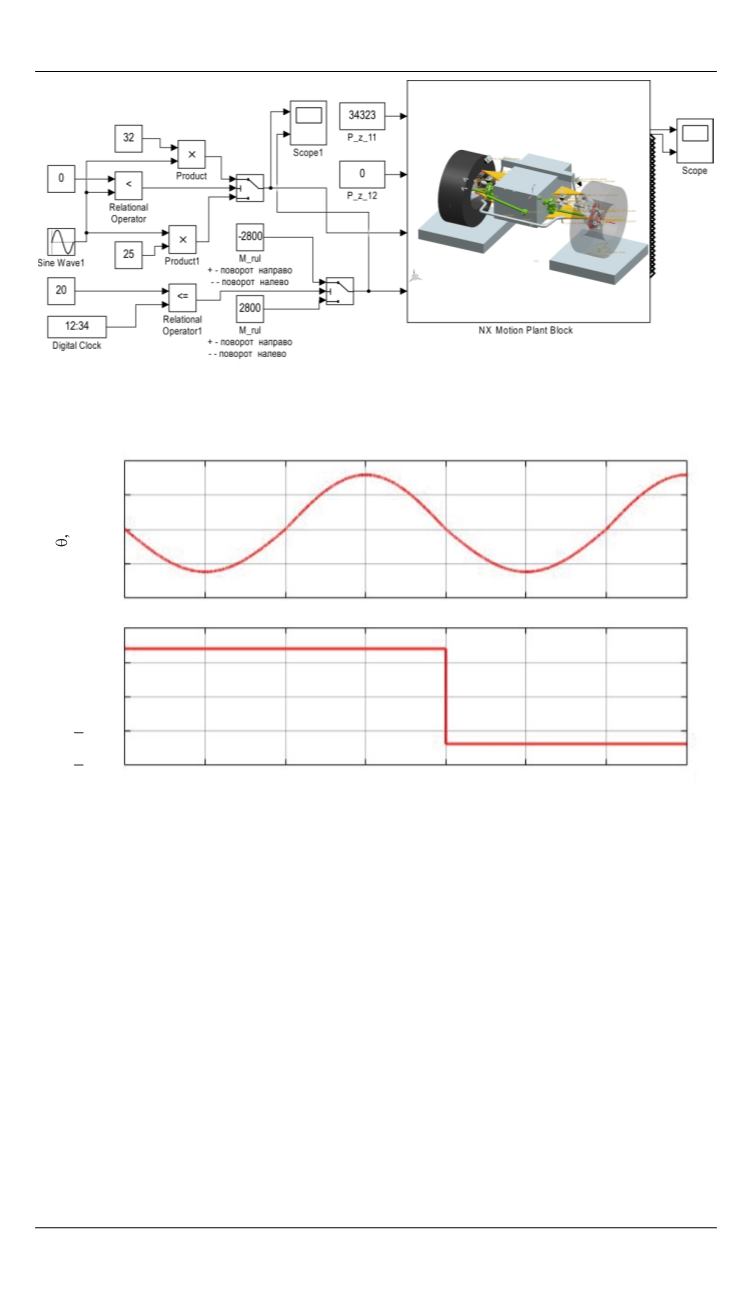
Рис. 5.
Модель управления стендом в среде MATLAB Simulink
Рис. 6.
Графики изменения угла
поворота левой опорной площадки (
а
)
и момента М
сошки
на рулевой сошке (
б
)
Пример расчета нагрузок деталей рулевого управления.
Рассмот-
рим работу виртуального стенда на примере рулевого управления с трапе-
цией и независимой подвеской автомобиля 4
4 с нагрузкой на переднюю
ось 3,5 т.
Произведен расчет нагрузок в шарнирах рулевого управления в тече-
ние 35 с. Значение крутящего момента, приложенного к рулевой сошке, —
2800 Н
м. Вертикальную нагрузку на колесе 34 323 Н прикладывали к од-
ному колесу оси, второе колесо при этом было вывешено. Максимальный
угол поворота левого колеса наружу 32
, внутрь — 25
задан по гармониче-
скому закону (табл. 2).
M
сошки
Н м
.
,
град
Время, с
25
15
20
35
0
10
5
30
4000
2000
– 40
20
2000
4000
0
– 20
40
0
а
б