














 4 / 12
4 / 12

Д.С. Вдовин, И.В. Чичекин, Т.Д. Поздняков
4
Инженерный журнал: наука и инновации
# 8·2017
колеса на сжатие и отбой шарнир 4 (см. рис. 3) задает перпендикулярность
оси
X
вспомогательного звена и оси вращения колеса. В шарнире вращения
5
задается закон управления поворотом опорной площадки и угла поворота
управляемых колес от нагружающей системы управления стендом. Сошка
рулевого механизма соединена шарниром вращения
7
с рамой стенда. В
этом шарнире от нагружающей системы управления стендом приложен
крутящий момент, нагружающий детали рулевого механизма. Стойки колес
соединены шаровыми шарнирами 6, ось
Z
которых проходит через центры
шарниров одного колеса.
Описание нагрузочных режимов.
В процессе эксплуатации автомо-
биля максимальные нагрузки в рулевом управлении реализуются в не-
скольких ситуациях [3, 5], которые можно смоделировать, используя пред-
ложенный виртуальный стенд (табл. 1).
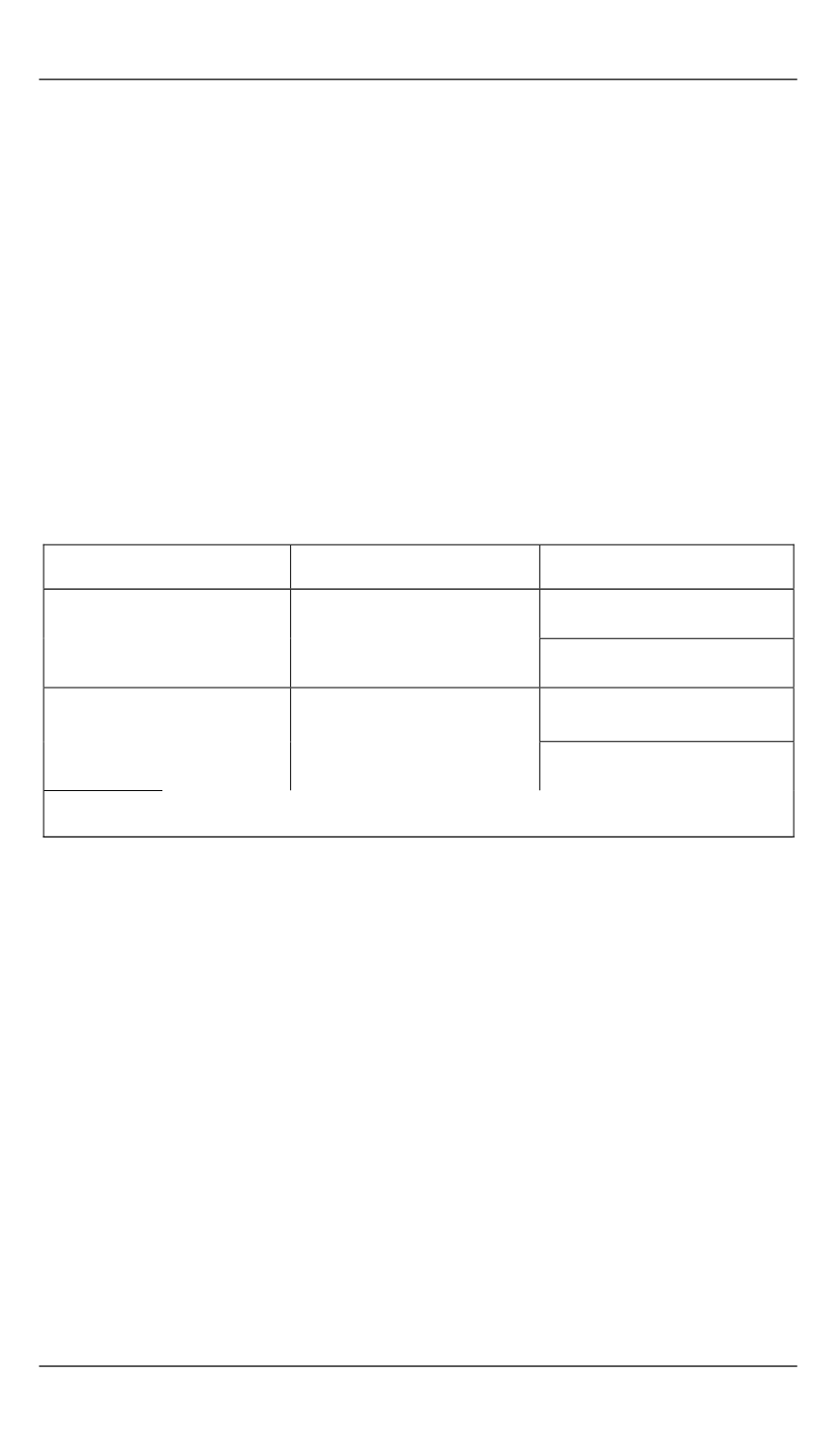
Таблица 1
Описание расчетных случаев нагружения рулевого управления совместно
с независимой подвеской и стабилизатором поперечной устойчивости
Расчетный случай
Положение колес
Момент, развиваемый
рулевым механизмом
Упор левого колеса
в препятствие с макси-
мальной силой на руле-
вом колесе
Правое колесо вывеше-
но, левое — на ходе сжа-
тия подвески
Максимальный положи-
тельный
Максимальный отрица-
тельный
Упор правого колеса
в бордюр с максималь-
ной силой на рулевом
колесе
Левое колесо вывешено,
правое — на ходе сжатия
подвески
Максимальный положи-
тельный
Максимальный отрица-
тельный
Положение колес произвольное.
Колеса поворачиваются с постоянной скоростью по закону управления.
В стенде описанные выше расчетные режимы задаются системой сил и
моментов, действующих на колесо и рулевую сошку, а угол поворота колес
и положение тяг и шарниров рулевого механизма задаются принудитель-
ным углом поворота опорной площадки. Детали рулевого управления
нагружены моментом, приложенным на рулевой сошке (рис. 4). Элементы
подвески нагружены вертикальной нагрузкой в пятне контакта колес с
опорной поверхностью. Силы, действующие в рулевых тягах, могут допол-
нительно нагружать подвеску автомобиля или разгружать ее в зависимости
от знака приложенного момента.
Управление вращением площадок (поворотом управляемых колес) и
нагружением колес вертикальными силами осуществлялось из модели
управления стендом в среде MATLAB Simulink (рис. 5). Использование мо-
дели MATLAB Simulink для управления виртуальной моделью автомобиля
и его агрегатов, в том числе рулевым управлением, является общепринятым
подходом и хорошо отработано в инженерной практике [6–8].
Чтобы в едином расчете реализовать все указанные в табл. 1 режимы
нагружения, осуществляли управление поворотом опорной площадки под ле-
вым колесом по гармоническому закону (рис. 6), размах угла поворота —