














 3 / 12
3 / 12

Виртуальный стенд для определения нагрузок на рулевое управление автомобиля
Инженерный журнал: наука и инновации
# 8·2017 3
Колеса
1
(см. рис. 2), установленные на опорных площадках
2
, могут
перемещаться относительно них по вертикали под действием вертикальной
силы. Момент силы трения в пятне контакта шины и опорной поверхности
передается пружиной кручения
3
с большой угловой жесткостью. Посколь-
ку колеса автомобиля при вертикальном перемещении меняют наклон оси
вращения, для передачи момента трения от площадки на колесо введено
дополнительное звено 4, ось
Z
которого всегда вертикальна, а ось
X
совпа-
дает с продольной осью колеса. Таким образом, звено
4
всегда параллельно
горизонтальной плоскости и поворачивается вместе с колесом. Соединение
колеса и дополнительного звена
4
осуществляется шаровым шарниром
5
в
центре колеса. Пружина кручения, установленная между опорной поверх-
ностью и дополнительным звеном, имитирует момент трения между шиной
и опорной площадкой.
Для связи звеньев использованы шарниры (рис. 3). Рычаги независимой
подвески крепятся к неподвижной раме автомобиля с помощью резиноме-
таллических шарниров
1
, моделируемых с помощью упругой втулки. Ось
вращения проходит через центры шарниров одного рычага и параллельна
оси
X
. Звенья рулевого управления соединены между собой шаровыми
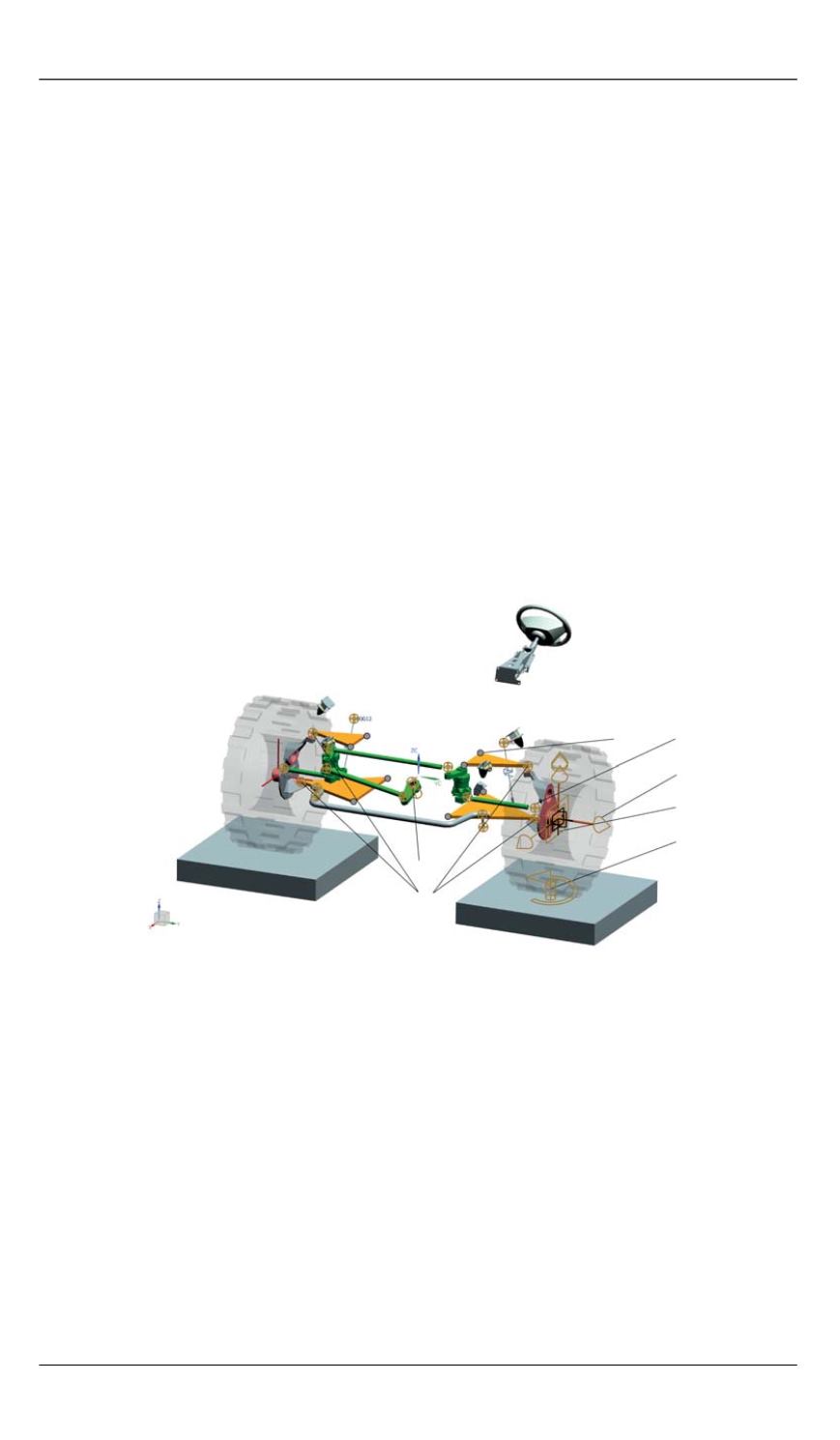
Рис. 3.
Схема размещения шарниров в модели рулевого управления и независимой
подвески автомобиля:
1
— резинометаллические шарниры подвески;
2
— шаровые шарниры рулевых тяг;
3
—
шарнир, устанавливающий параллельность оси Z глобальной системы координат и оси
Z
полусвязанной системы координат;
4
— шарнир, устанавливающий перпендикулярность
между осью вращения колеса и осью
X
полусвязанной системы координат;
5
— цилиндриче-
ский шарнир сошки с заданным законом поворота опорной площадки;
6
— шаровые шарниры
подвески;
7
— цилиндрический шарнир рулевой сошки
шарнирами
2
, системы координат которых совпадают с глобальной систе-
мой координат стенда. Шарнир
3
устанавливает ось
Z
вспомогательного
звена (см. поз.
4
на рис. 2) всегда параллельной оси
Z
глобальной системы
координат. Для синхронизации вращения колеса и управляемой опорной
площадки установлен шарнир. Для обеспечения возможности колеса вра-
щаться под действием крутящего момента, а также наклоняться при ходе
1
2
3
4
5
6
7