
















 17 / 23
17 / 23

О некоторых особенностях поиска оптимального управления …
Инженерный журнал: наука и инновации
# 3
⋅
2016 17
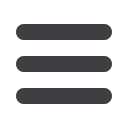
Рис. 10.
Графики изменения сопряженной переменной
yL
p
для
различных значений наклонения целевой орбиты:
— ik = 60°, 40°;
— ik = 65°, 35°;
— ik = 70°, 30°;
— ik = 75°, 25°;
— ik = 80°, 20°
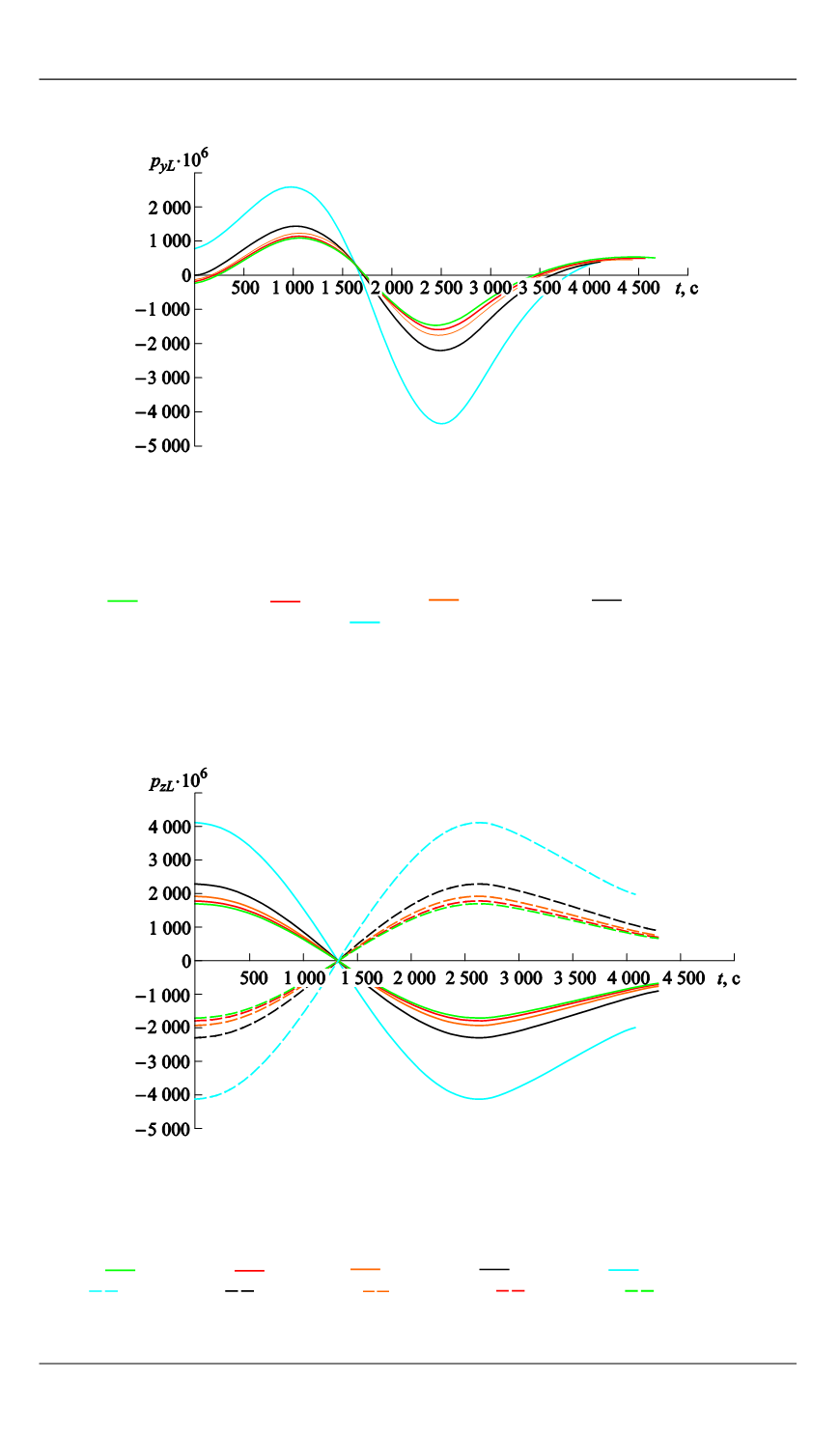
Рис. 11.
Графики изменения сопряженной переменной
zL
p
для
различных значений наклонения целевой орбиты:
— ik = 80°;
— ik = 7°;
— ik = 70°;
— ik = 65°;
— ik = 60°;
— ik = 40°;
— ik = 35°;
— ik = 30°;
— ik = 25°;
— ik = 20°