















 6 / 19
6 / 19

Н.В. Котюженко, Л.А. Савин
6
Инженерный журнал: наука и инновации
# 2
2016
предыдущим звеном, в абсолютную (базовую) систему отсчета, являю-
щуюся инерциальной системой координат для рассматриваемой дина-
мической системы, в данном случае манипулятора.
Каждая относительная система координат формируется на основе
следующих трех правил:
1) ось
z
i
–1
направлена вдоль оси
i-
го сочленения (кинематической
пары);
2) ось
x
i
перпендикулярна оси
z
i
–1
и направлена от нее;
3)
ось
y
i
дополняет оси
x
i
и
z
i
до правой декартовой системы коор-
динат.
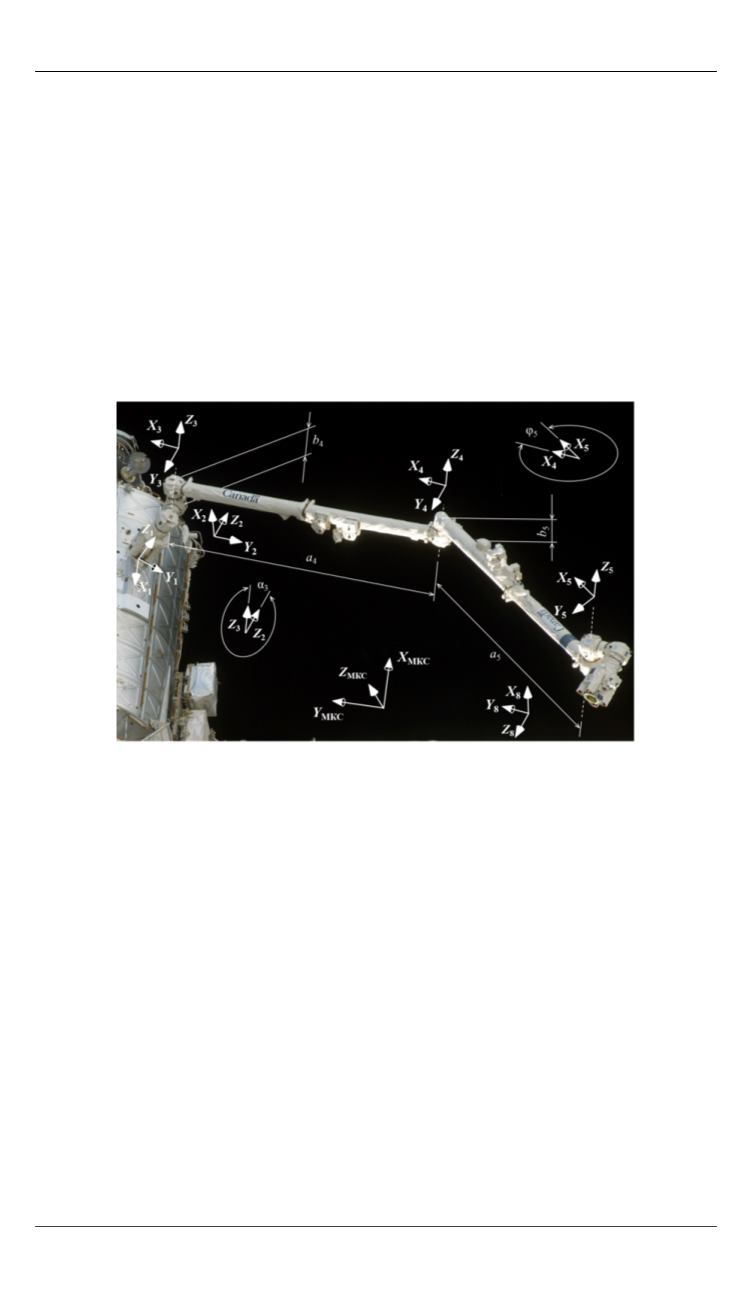
На рис. 3 приведен пример построения относительных систем ко-
ординат для манипулятора SSRMS (Space Station Remote Manipulator
System — дистанционный манипулятор космической станции).
Рис. 3.
Система координат Денавита — Хартенберга для манипулятора SSRMS
Системы координат нумеруют в порядке возрастания от основания к
захвату манипулятора. Представление Денавита — Хартенберга твер-
дых звеньев зависит от четырех геометрических параметров, соответ-
ствующих каждому звену. Эти четыре геометрических параметра пол-
ностью описывают любое вращательное или поступательное движение
и определяются в соответствии с рис. 3 следующим образом:
φ
i
— присоединенный угол, на который надо повернуть вокруг
оси
z
i
–1
ось
x
i
–1
, чтобы она стала сонаправлена с осью
x
i
(знак опреде-
ляется в соответствии с правилом правой руки);
b
i
— расстояние между пересечением оси
z
i
–1
с осью
x
i
и нача-
лом (
i
– 1)-й системы координат, отсчитываемое вдоль оси
z
i
–1
;
a
i
— линейное смещение — расстояние между пересечением
оси
z
i
–1
с осью
x
i
и началом
i
-й системы координат, отсчитываемое
вдоль оси
x
i
, т. е. кратчайшее расстояние между осями
z
i
–1
и
z
i
;
α
i
— угловое смещение — угол, на который надо повернуть во-
круг оси
x
i
ось
z
i
–1
, чтобы она стала сонаправленной с осью
z
i
(знак
определяется в соответствии с правилом правой руки).