














 3 / 19
3 / 19

Моделирование операции приближения космического манипуляционного робота…
3
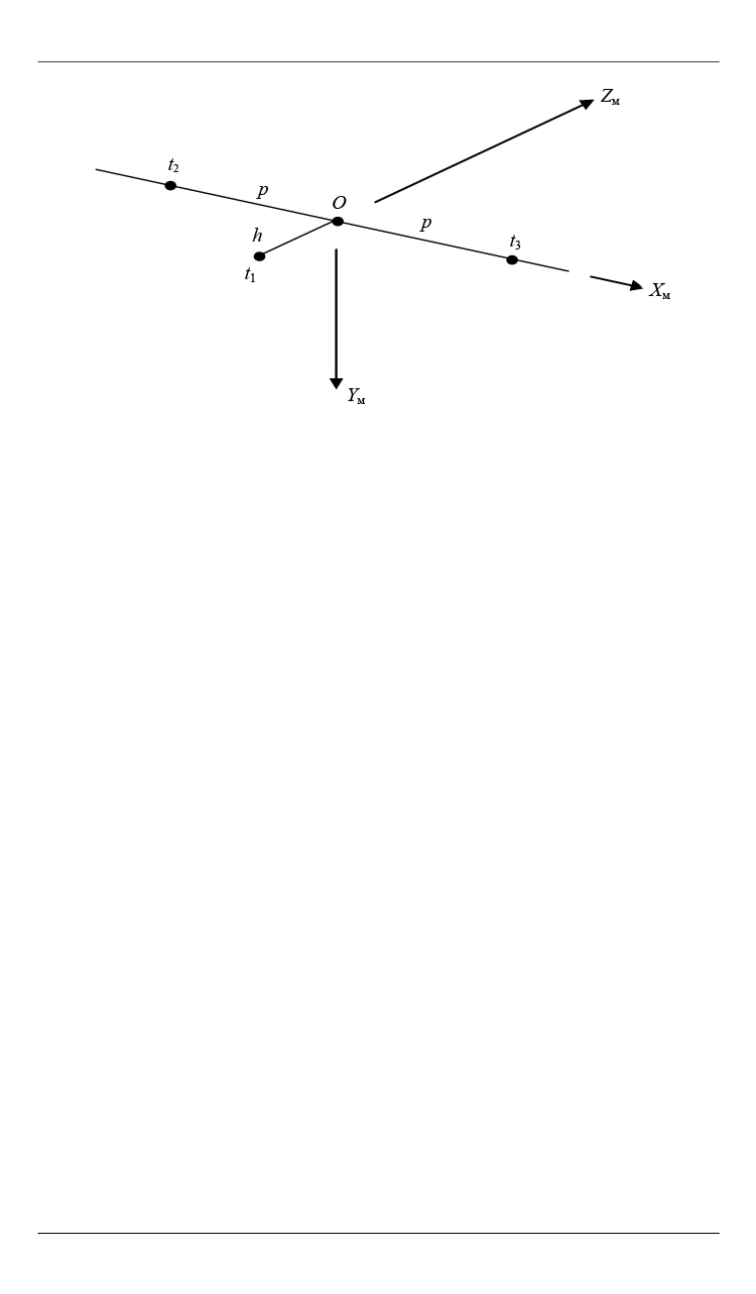
Рис. 3.
Расчетная схема для определения координат камеры
Здесь
1 2 3
, ,
t t t
— характерные точки мишени — геометрические цен-
тры окружностей верхних граней штырьков (координаты изображе-
ний именно этих точек удобно использовать для геометрической ка-
либровки камеры);
р
— расстояние между точками
1
t
и
2
t
или
1
t
и
3
t
;
h
— разность по высоте штырьков
1
t
и
2
t
или
1
t
и
3
t
.
Введем необходимые для расчетов обозначения:
к
м,к
t
— вектор,
направленный из начала СК камеры к началу СК мишени, заданный в
СК камеры;
м
,м
i
t
—
вектор, направленный из начала СК мишени к
точке
i
t
в СК мишени,
i
= 1, …, 3.
Координаты точек мишени по отношению к СК камеры в СК ка-
меры определяются следующим выражением:
к к
м
,к м,к к,м ,к
i
i
t
t
t
,
i
= 1, … , 3. (1)
В выражении (1)
к,м
— матрица поворота при переходе от СК
мишени к СК камеры. Эта матрица может быть записана в виде про-
изведения трех матриц, сформированных из трех углов Эйлера
, , :
к,м к,м
к,м
к,м
( , ) ( , ) ( , ).
Z
Y
X
(2)
Матрицы-сомножители в выражении (2)
операторы поворота во-
круг осей
X
,
Y
и
Z
соответственно.
Компоненты векторов
м
1,м
,
t
м
2,м
t
и
м
3,м
t
имеют следующие значе-
ния: