Простой алгоритм терминального управления пневмоприводом…
7
Алгоритм работы: если
1
2
16085, 71429 16800
27
u
b
b A
В,
тогда
0 ,
u
u
иначе
0
27
u
A
В.
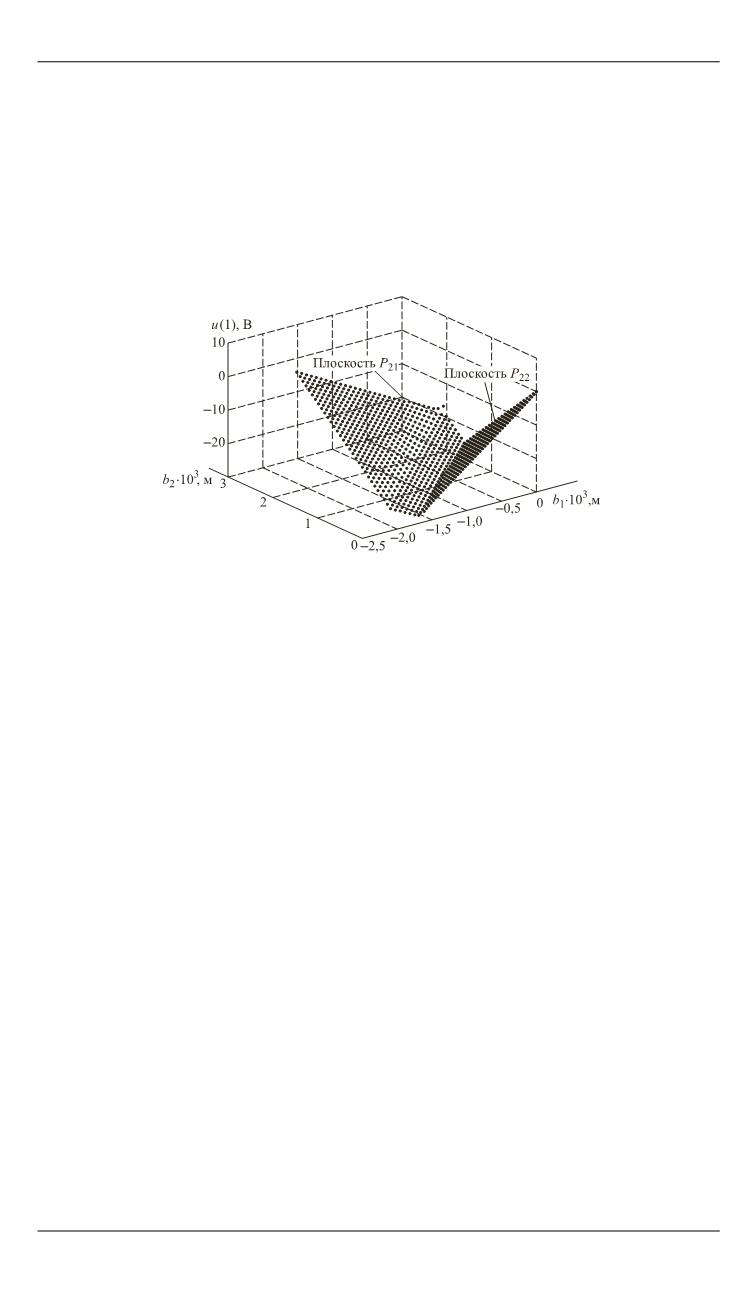
Второй интервал управления
(рис. 4). Плоскости переключения
21
1
2
: 1 11360, 09445 13311, 68831 46, 79793388,
P u
b
b
В;
22
1
2
: 1 16521, 42857 15807,14286 ,
P u
b
b
В.
Рис. 4.
Плоскости переключения для второго интервала управления
Пересечение плоскостей и проекция линии пересечения на плос-
кость
1 2
0
b b
2
21 22
2
1
:
0, 9575083 0, 0016071.
ПP П P P b
b
Алгоритм работы: если
2
1
0, 9575083 0, 0016071,
b
b
тогда
22
1
,
u P
иначе
21
1
.
u P
Третий интервал управления
(рис. 5). Плоскости переключения
31
1
2
: 2 8084, 642857 8462,857143 46,8167,
P u
b
b
В;
32
1
2
: 2 16220, 48872 16933, 64662 0, 004,
P u
b
b
В.
Пересечение плоскостей и проекция линии пересечения на плос-
кость
1 2
0
b b
3
31 32
2
1
:
0, 9570267 0, 0016071.
ПP П P P b
b
Алгоритм работы: если
2
1
0, 9570267 0, 0016071,
b
b
тогда
32
2
,
u P
иначе
31
2
.
u P


