В.И. Краснощеченко
10
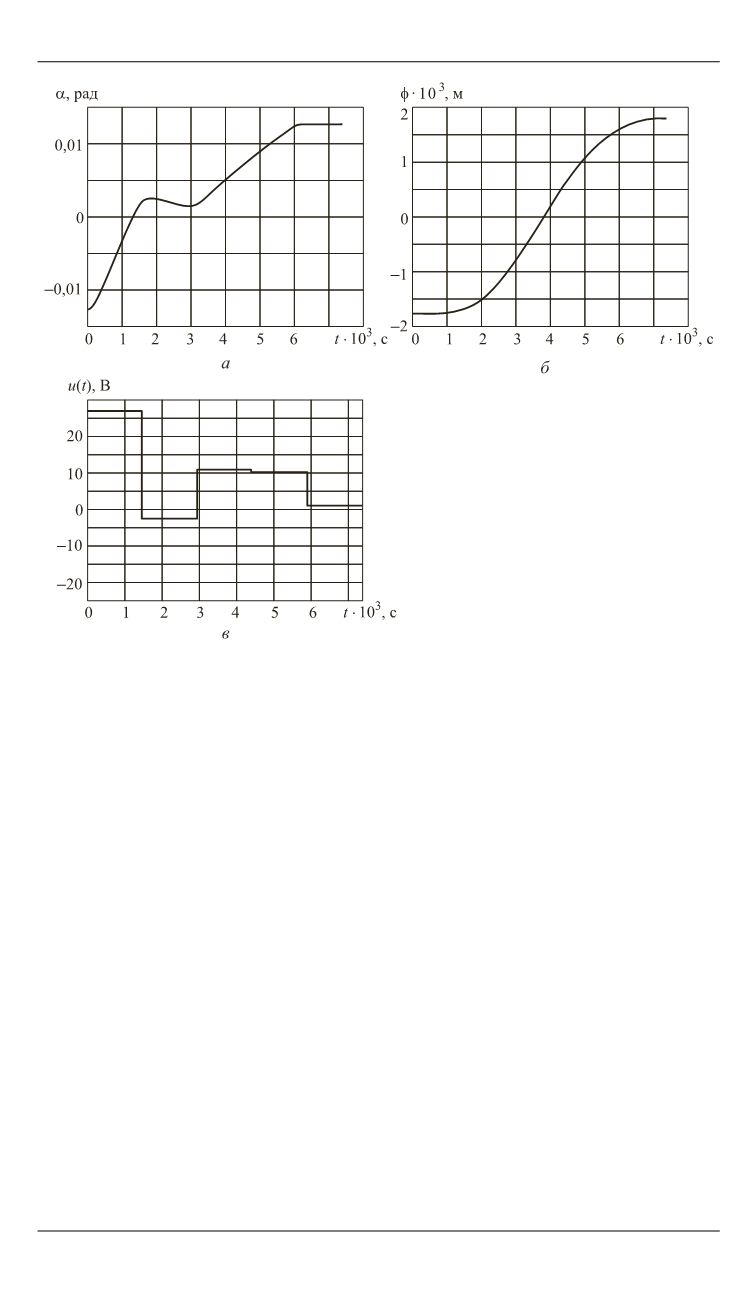
Рис. 8
. Графики перевода системы из состояния
3
1
0
1,8 10
b
м
в состояние
*
3
2
1,8 10
T b
м с использованием СМ-алгоритма:
а
— изменение угла
;
t
б
— перемещение штока ( );
t
в
— график управления
u
(
t
)
ЛИТЕРАТУРА
[1] Фалдин Н.В, Моржов А.В. Синтез локальным методом оптимального по
быстродействию рулевого пневмопривода.
Известия ТулГУ. Сер. Техни-
ческие науки. Вып. 5: в 3 ч. Ч. 1.
Тула, Изд-во ТулГу, 2011, c. 118–128.
[2] Пупков К.А, Фалдин Н.В., Егупов Н.Д.
Методы синтеза оптимальных
систем автоматического управления.
Москва, Изд-во МГТУ им. Н.Э. Ба-
умана, 2000, 512 с.
[3] Понтрягин Л.С., Болтянский В.Г., Гамкрелидзе Р.В., Мищенко Е.Ф.
Ма-
тематическая теория оптимальных процессов
. Москва, Наука, 1976,
391 с.
[4]
Краснощеченко В.И. Симплекс-метод для решения задачи быстродействия
при наличии ограничения на скалярное управление и фазовых ограничений.
Инженерный журнал: наука и инновании
, 2014, вып. 6. URL:
Статья поступила в редакцию 03.04.2014
Ссылку на эту статью просим оформлять следующим образом:
Краснощеченко В.И. Простой алгоритм терминального управления
пневмоприводом при наличии фазового ограничения и ограничения на
управление.
Инженерный журнал: наука и инновации
, 2014, вып. 7. URL:
engjournal.ru/catalog/it/asu/1253.html


