В.И. Краснощеченко
6
Рассмотрим применение СМ-алгоритма для управления пневмо-
приводом при любых начальных и конечных условиях, причем вы-
бранное фиксированное время
3
0
7, 4 10
T
с и фиксированное число
5
N
равных интервалов кусочно-постоянного управления позво-
ляют практически без временных потерь и скользящих режимов
обеспечить необходимый переход. А для значительного упрощения и
убыстрения работы алгоритма управления в режиме онлайн получе-
на аппроксимация решения задач СМ-алгоритмом с использованием
плоскостей переключения (ПП-алгоритм).
Построение плоскостей переключения для определения
управления на отдельных интервалах.
Варианты для начального
и конечного положения выходной координаты
следующие:
*
1
0
;
b b
*
2
0
,
b b
где
*
max
0,0021
b
м. Интервалы
*
2
1
, 0
, 0
0, 0021; ... ; 0
D K
b
b
м и
*
2
0,
b
b
2
0,
0; ...; 0,0021
D K
м разбиты на 30 равных подинтервалов
и для каждого значения
1 2
,
b b
решена задача оптимизации (всего
900 задач).
По результатам моделирования получены аппроксимирующие
плоскости переключения.
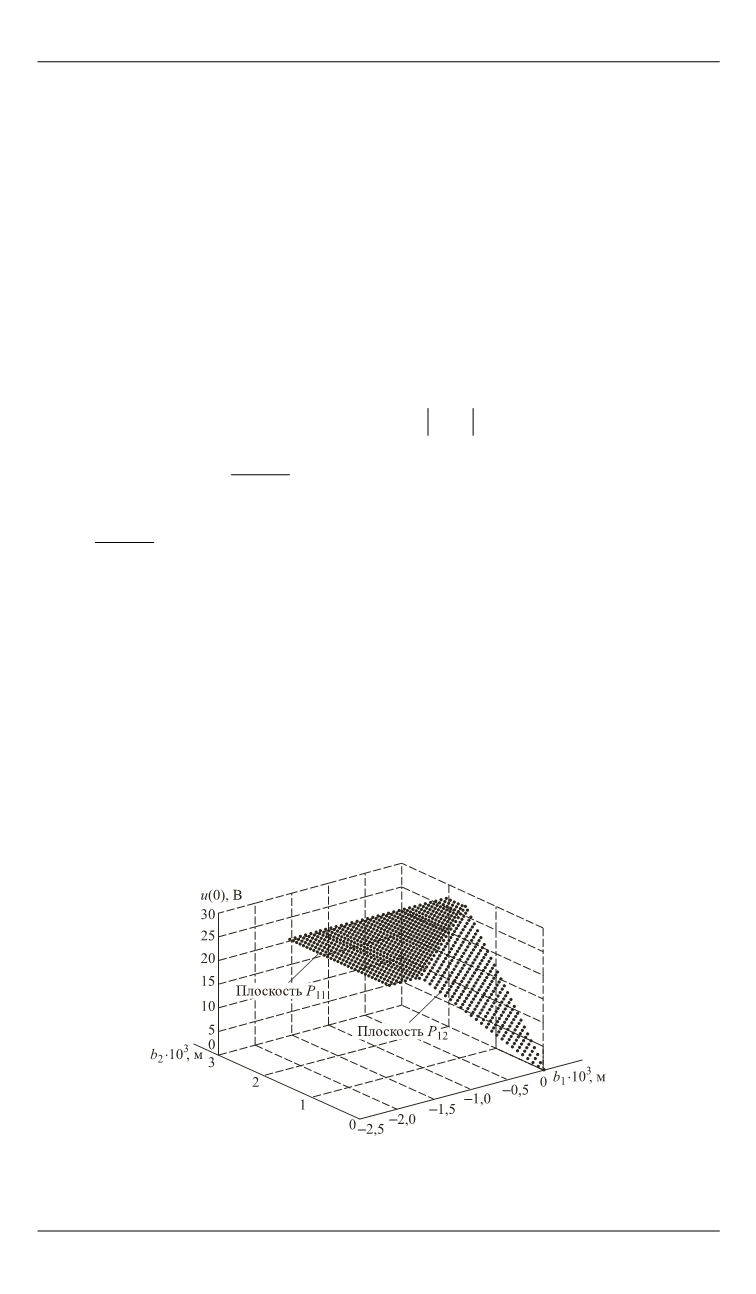
Первый интервал управления
(рис. 3). Плоскости переключения
11
: 0
27
P u
A
В;
12
1
2
: 0 16085, 71429 16800 ,
P u
b
b
В.
Рис. 3.
Плоскости переключения для первого интервала управления


