Исследование динамического потенциала шины на поверхностях, покрытых слоем льда
9
01
12
( )
sin 2
sin 2 sin 2
U t U U f t
f t
ft
′
′
= + Δ
π + β π
π
при
0
t t
<
,
02
12
( )
sin 2
U t U U ft
= + βΔ
π
при
0
t t
≥
,
где
f
— частота, принимающая дискретные значения (5, 10, 15, 20,
25, 30 Гц);
β
— коэффициент, принимающий значения от 0 до 1.
В дальнейшем полученные законы управления используются при
экспериментальных исследованиях поведения физической модели
автомобиля.
В соответствии со схемой (см. рис. 5) разработана конструкция,
которая позволяет изменять угол подъема и производить оценку по-
ведения физической модели на поверхности льда при различных за-
конах управления крутящими моментами.
, м/с
V
4, 6
5
5, 4
5,8
6, 2
0 0,5
1
1,5
2
2,5
, с
t
а
0
0,5
1
1,5
2
2,5
, с
t
б
1
−
0
1
2
3
4
5
, Н
F
∑
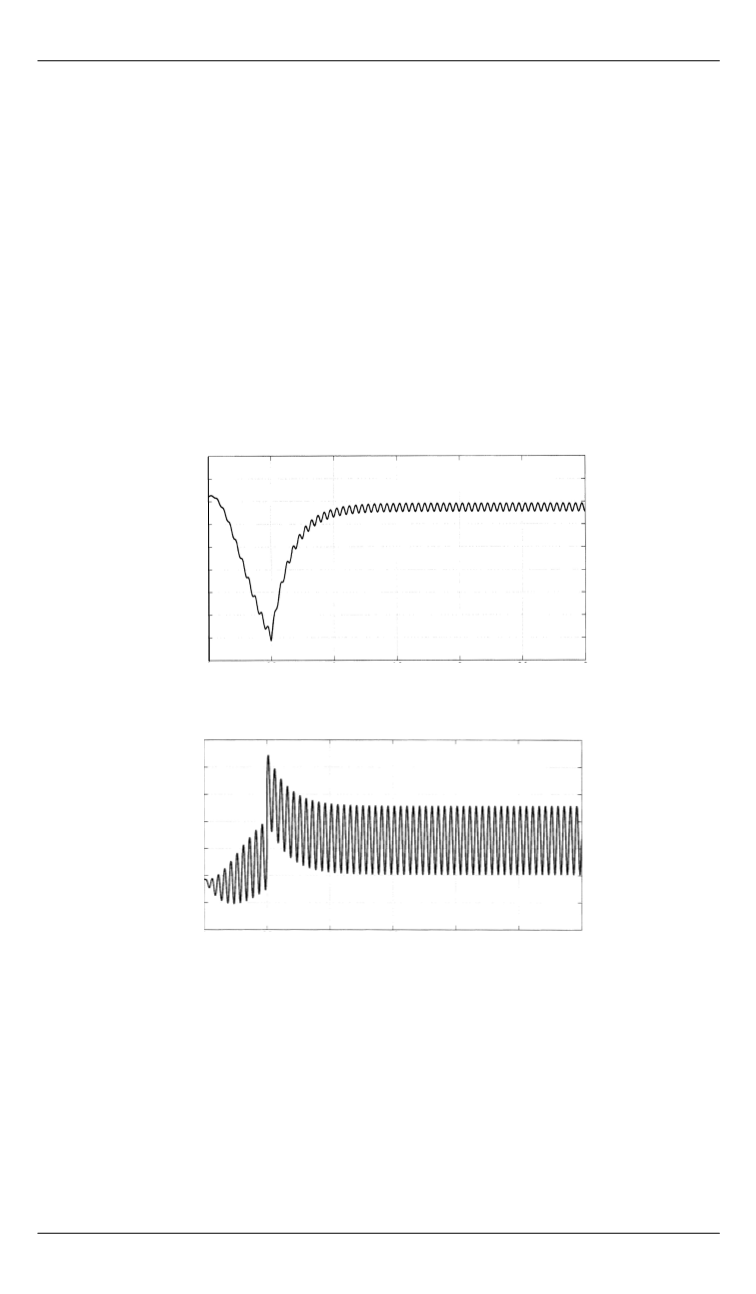
Рис. 6.
Изменение суммарной скорости автомобиля
V
(
а
) и суммарной
подводимой тяговой силы
F
∑
(
б
) при въезде автомобиля на подъем в
случае импульсного управления движения ( 1;
20 Гц;
8
f
β = =
α = °
)
Предварительные тестовые испытания модели позволили уточ-
нить некоторые электрические параметры и скорректировать вы-
бранную методику.


