Исследование динамического потенциала шины на поверхностях, покрытых слоем льда
7
z
O
1
O
α
α
1
z
1
z
′
x
1
x
′
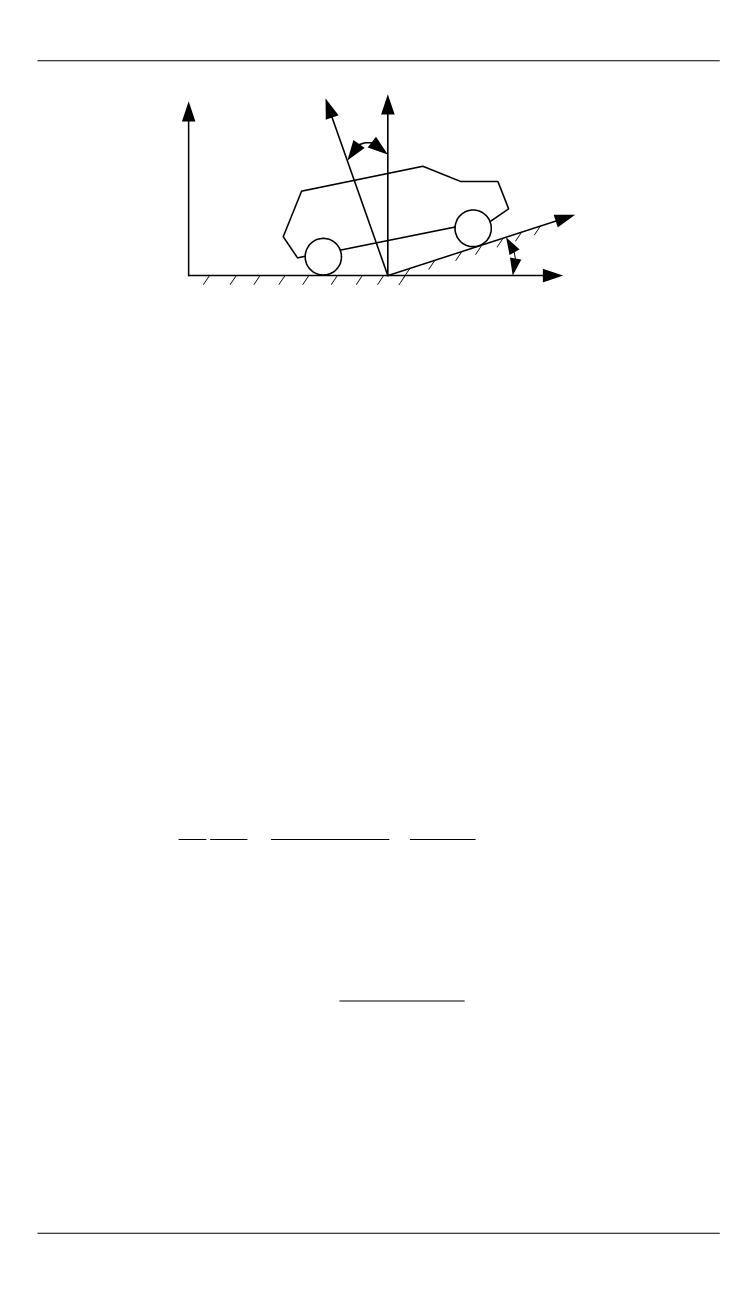
Рис. 5.
Расчетная схема движения автомобиля (
α
— угол подъема опорной
поверхности)
На этапе разработки алгоритма управления рассматриваются ре-
жимы, когда моменты на колесах не достигают своих предельных
значений, колеса считаются жесткими и пробуксовывание отсутству-
ет. Обычно для электромеханических трансмиссий при необходимо-
сти управления подводимым крутящим моментом разрабатывают ал-
горитм, который позволяет управлять током и, следовательно, кру-
тящим моментом.
Для проведения испытаний физической модели автомобиля необ-
ходимо использовать источник тока, однако ввиду технических слож-
ностей было принято решение использовать генератор напряжения.
Ниже показано, что разработанный алгоритм управления позво-
ляет достичь улучшения тягово-сцепных свойств при импульсном
управлении крутящими моментами.
Таким образом, математическая модель автомобиля при движе-
нии описывается следующими уравнениями:
тр тр
a
0
( )
sin
fi
gb
x
M
M t i
G dV
G
g dt
r
r
η
=
−
− α
∑
,
(1)
( )
U U t
=
,
я
gl
A
U U J R
= + ⋅
,
(2)
дв
я эм дв
( )
M KФJ U
= η
,
(3)
дв
я я
дв
( )
U t J R
K
−
ϖ =
Φ
.
(4)
Здесь
a
G
— вес автомобиля (модель);
x
V
— проекция скорости ав-
томобиля на ось
Х
(см. рис. 5);
тр
i
— передаточное число трансмис-
сии;
δ
— коэффициент, учитывающий вращающиеся массы; ( )
U t
—
задаваемое напряжение;
r
— радиус колеса;
( )
эм
U
η = η
— коэффи-
циент полезного действия электродвигателя в зависимости от подво-


