Разработка закона динамической стабилизации многоосной колесной машины…
13
В целях подтверждения эффективности закона распределения
мощности по колесам, а также для проверки возможности организа-
ции на практике разработанной системы управления тяговыми элек-
тродвигателями были проведены теоретические исследования с по-
мощью имитационного математического моделирования. Особенно-
сти математической модели движения МКМ рассмотрены в работах
[10‒12].
Ниже представлены результаты численного моделирования дви-
жения МКМ с колесной формулой 8×8, полной массой 60 т, с подве-
дением мощности к движителям по предложенному алгоритму и
управлением тяговыми электродвигателями по моменту. Моделирует-
ся вход и движение в повороте с фиксированным радиусом
п
21
R
=
м.
МКМ начинает двигаться со скоростью
20
V
=
км/ч на опорном осно-
вании «сухой лед» (с коэффициентом взаимодействия движителя с
опорным основанием при полном буксовании
max
0,1
s
μ =
), все ее ко-
леса являются управляемыми. В качестве закона управления углом
поворота колес принят закон, описанный в работе [13]. Время моде-
лирования
60
t
=
c.
Поворот МКМ моделировали при постоянном уровне нажатия на
педаль акселератора; угол поворота рулевого колеса изменялся от
нуля до максимального значения в течение 1 с и далее оставался
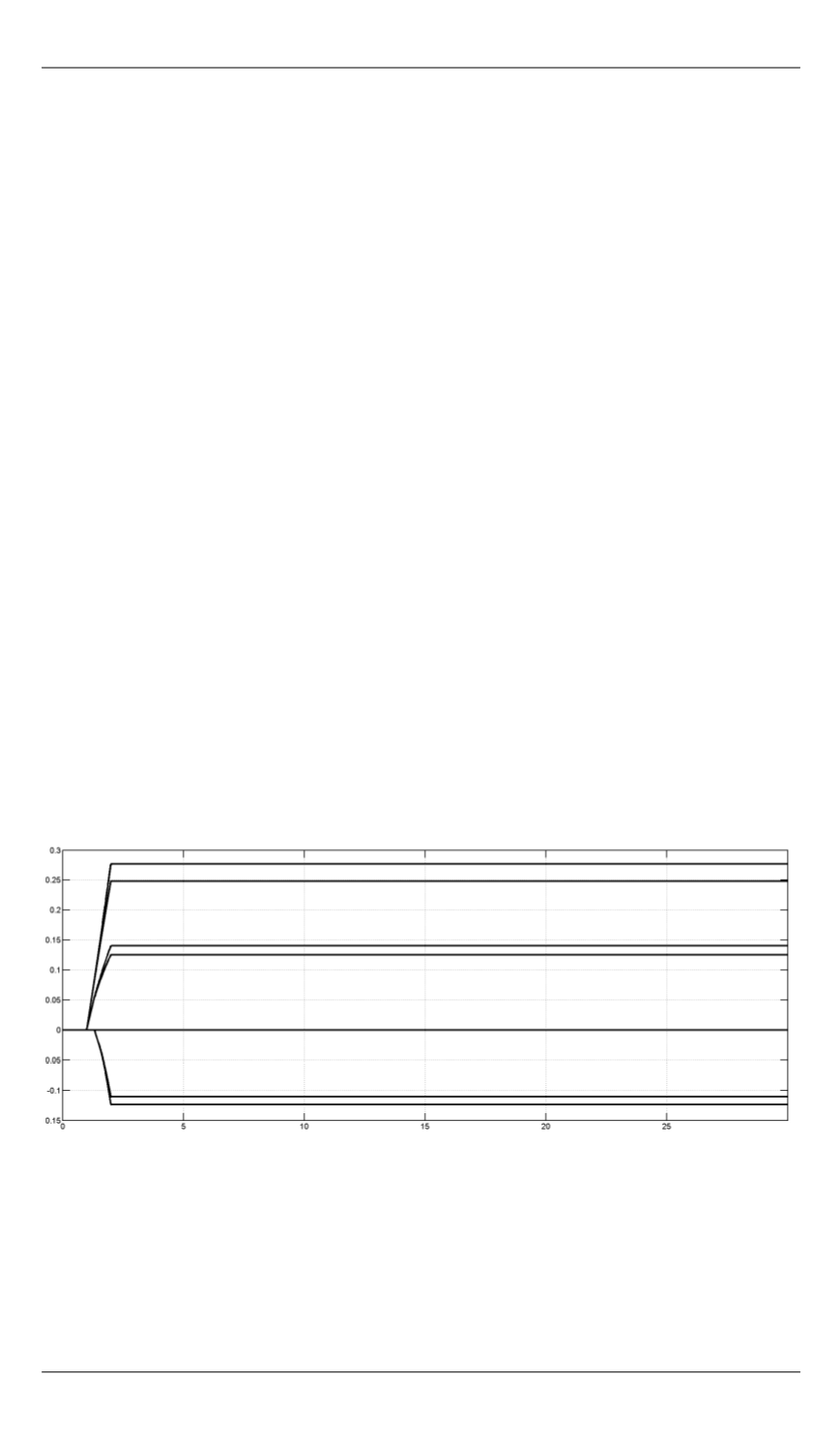
неизменным. Результаты моделирования показаны на рис. 5.
, рад
i
θ
, с
t
Рис. 5.
Зависимости изменения угла поворота управляемых колес
от времени
Для проверки работоспособности предложенного алгоритма было
проведено численное моделирование движения машины без СДС
(рис. 6) и с СДС (рис. 7).


