Разработка закона динамической стабилизации многоосной колесной машины…
3
где
1
n
l
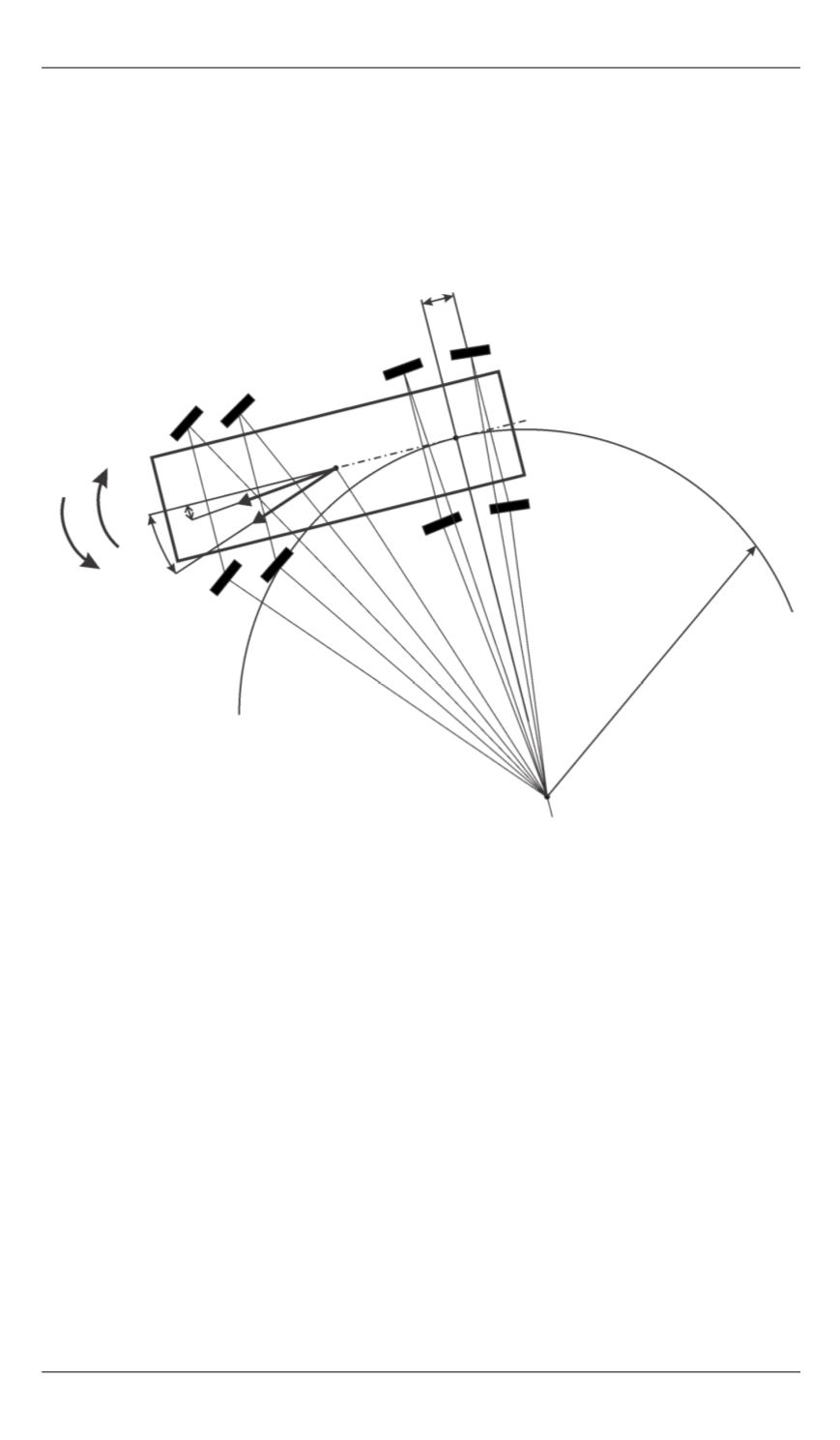
— расстояние от центра масс корпуса МКМ до задней оси;
x
р
— координата смещения полюса поворота относительно задней
оси МКМ;
L
— база МКМ;
θ
1
— угол поворота задающего (внутрен-
него переднего) управляемого колеса.
возм
М
стаб
М
О
п
R
p
x
С
Р
т
θ
ф
θ
Рис. 1.
Угол отклонения вектора скорости от продольной оси МКМ
Факт возникновения заноса передних или задних осей МКМ
устанавливают исходя из следующих условий:
• если
(
)
т
ф
1
sgn
sgn
0,
θ − θ
θ >
то система диагностирует наступ-
ление заноса передних осей;
• если
(
)
т
ф
1
sgn
sgn
0,
θ − θ
θ <
то система диагностирует наступ-
ление заноса задних осей.
Несовпадение углов направлений теоретического и фактического
векторов скорости означает, что на МКМ действует динамический
возмущающий момент
М
возм
(см. рис. 1), стремящийся «увести» МКМ
с заданной водителем траектории движения. Для компенсации этого
воздействия необходимо создать динамический стабилизирующий
момент
М
стаб
, который не позволит МКМ сойти с траектории.
Основные проблемы при реализации алгоритмов работы систем
активной безопасности связаны с невозможностью точного опреде-


