Особенности использования адаптивного гидропривода в робототехнических системах
9
Поскольку величины
P
н0
и
P
ст
взаимосвязаны, зависимость (7)
можно переписать в виде функции только одного аргумента:
max
max
min
min
1,5 (
)
(
)
.
(
2 )
P
P
P
P
K P K
P
P
P
− ∆
+ ∆
∆ =
+ ∆
ном н
ст
н
ст
э ст
э
н
н
ст
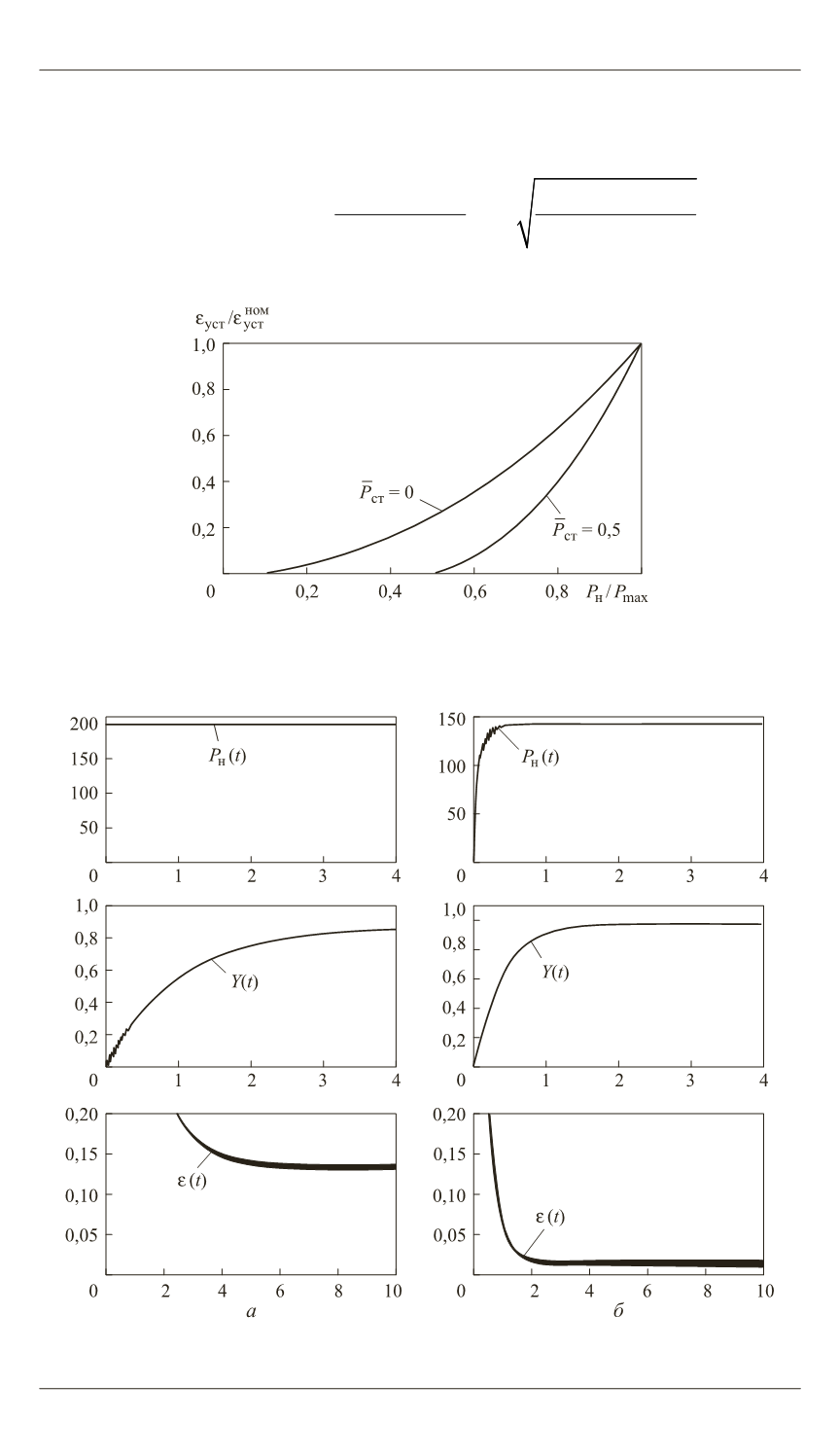
Рис. 6.
Относительная ошибка в ГП с управляемым коэффициентом усиления
Рис. 7.
Переходные процессы в исходной (
а
) и адаптивной (
б
) системах


