Особенности использования адаптивного гидропривода в робототехнических системах
7
*
QP
K
— коэффициент эластичности характеристики по отношению к дав-
лению гидропитания,
(
)
(
)
(
)
0
max
0
0
1
*
2
QP
P P
a
K
P P
P P
+ ∆
σ
=
−
− ∆
+ ∆
н
ст
н
ст
н
ст
;
Δ
P
— приращение перепада давления в полостях гидроцилиндра,
Δ
P
= Δ
P
1
− Δ
P
2
.
Система уравнений (1), (2), (5) и (6) с учетом принятых допущений
описывает динамику ГП, подключенного к гидравлическому источнику
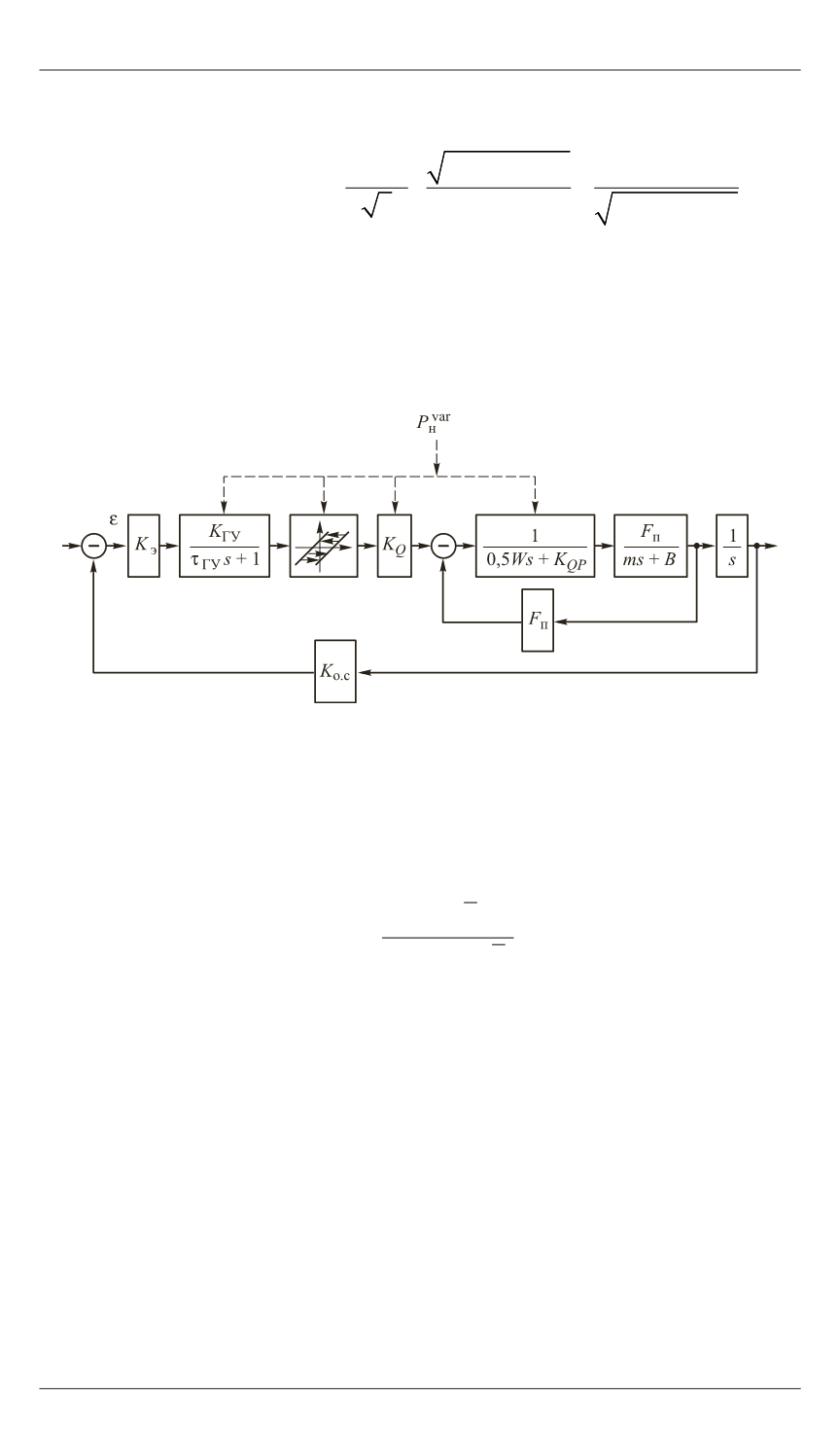
питания переменного давления. Структурная схема привода представ-
лена на рис. 4.
Рис. 4.
Структурная схема ГП, подключенного к ИГП переменного давле-
ния (ε — ошибка в ГП)
Величина установившейся ошибки ГП с переменным давлением
нагнетания зависит от ряда параметров принятой математической мо-
дели и определяется выражением
max
max
.
T P
S K K P
ε =
ГУ
тр н
уст
з э
н
Оценим возможность снизить влияние нелинейности золотникового
распределителя на точность работы ГП при использовании самона-
страивающейся структуры построения его системы управления.
Рассмотрим характеристическое уравнение ГП вида
3
2
2
1
.
( ) 0,5
(
0,5 )
(
)
.
ГУ
п
о с э
п з з
−
λ = β λ +
+ β λ +
+ λ +
+
QP
QP
Q
D
Wm K m WB K B F
K K K K F S c
Пусть выполняются условия 0,5
Q
WB K m
β
и
2
.
QP
K B F
п
Тогда,
используя алгебраический критерий устойчивости Гурвица, можно по-
лучить выражение для граничного значения коэффициента усиления
управляющей части ГП. Для наглядности будем использовать его нор-


