Особенности использования адаптивного гидропривода в робототехнических системах
3
Основная проблема дальнейшего распространения и развития ги-
дромеханических и электрогидравлических систем такого класса в под-
водной области обусловлена сложностью их аппаратной реализации
и нестабильностью регулировочных характеристик привода при вариа
циях выходного давления ИГП.
В общем случае для создания любой адаптивной к нагрузке гидрав-
лической системы необходимо решить две задачи: первая — синтез алго
ритмов измерения текущей нагрузки в ГП и формирование на основе
полученной информации требуемого закона изменения выходного дав-
ления
P
н
(
t
) ИГП; вторая — реализация методов обеспечения инвариант-
ности характеристик ГП (как минимум статических регулировочных)
к изменениям
P
н
(
t
), которые выступают в роли внешнего возмущения.
Рассмотрим алгоритмы управления ГП, которые могут не только
обеспечить стабильность регулировочных свойств, но и повысить точ-
ность отработки задающих сигналов. Анализ проведем на примере ти-
пового следящего ГП, включающего в свой состав двухкаскадный
электрогидравлический усилитель сопло-заслонка—золотник и испол
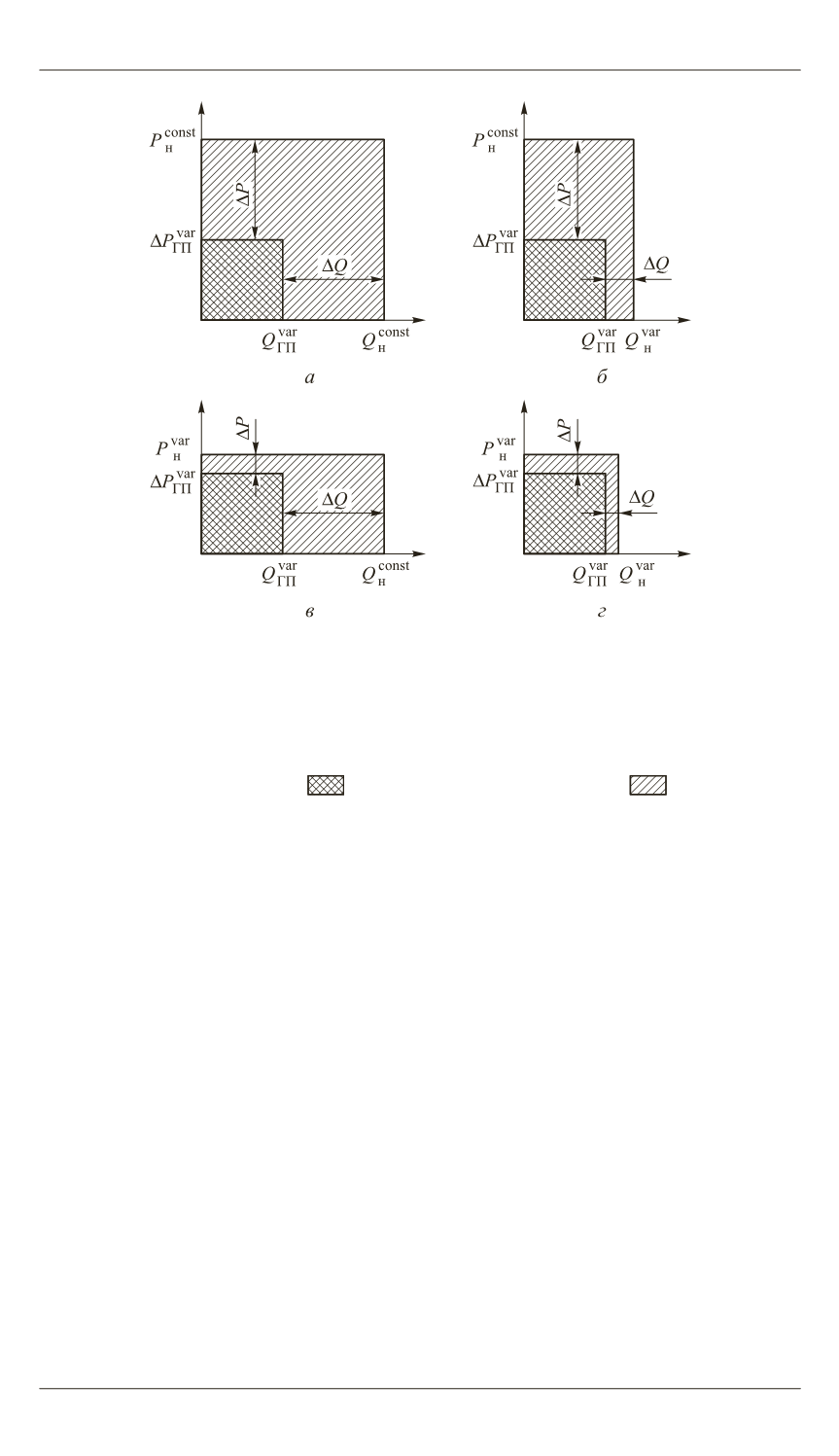
Рис. 1.
Диаграммы использования мощности для различных вариантов
построения ГП:
а
— ИГП с насосом постоянной производительности;
б
— ИГП с насосом пере-
менной производительности;
в
— ИГП с автоматической настройкой выходного
давления и постоянной производительностью;
г
— ИГП с двумя переменными
выходными координатами;
— используемая мощность,
— мощность
источника, переходящая в тепло


