Состояние и перспективы развития наземных робототехнических комплексов
7
В МГТУ им. Н.Э. Баумана была разработана система автономного
управления движением, обеспечивающая автоматическую маршрутную
навигацию и управление движением наземных РТК.
Навигационная подсистема обеспечивает ориентацию, местополо-
жение РТК и привязку текущих моделей внешней среды к цифровой
карте местности (базе данных) с точностью, необходимой для автоном-
ного движения РТК в условиях индустриально-городских сред, сети
дорог и пересеченной местности. Основные элементы навесного обо-
рудования системы автоматического управления движением САУД при-
ведены на рис. 4. На рис. 5 показаны примеры работы комплексирован-
ной СТЗ в составе системы управления движением автономного РТК
в различных средах функционирования, построение автономным робо-
том глобальной и планирование локальных траекторий движения.
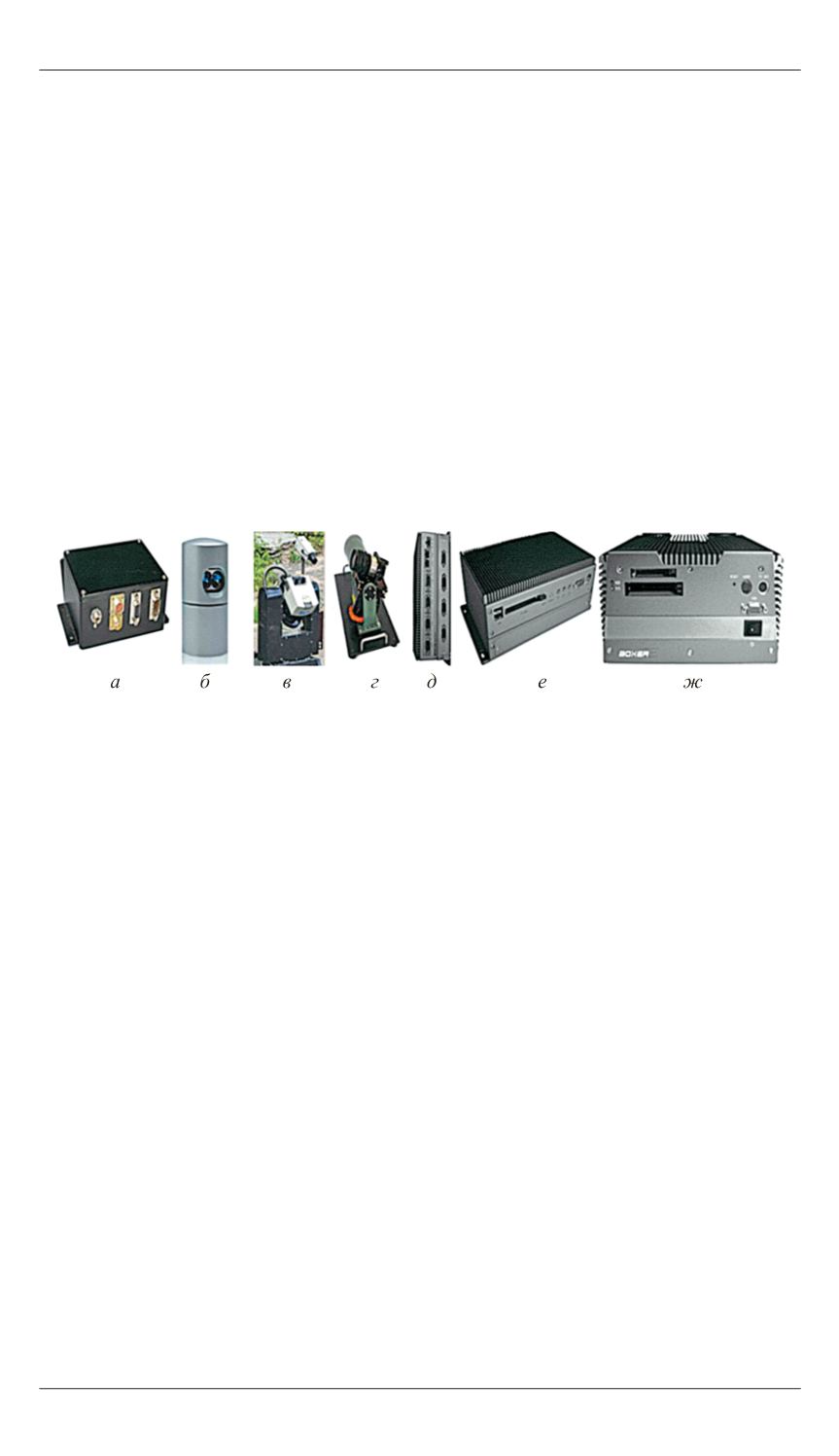
Рис. 4.
Основные элементы системы автономного управления движением:
а
—шлюз системы дистанционного управления;
б
— лазерный сканатор;
в
— СТЗ
на базе телевизионной и дальнометрической информации ближнего действия;
г
— СТЗ на базе телевизионной и дальнометрической информации дальнего дей
ствия;
д
— блок обработки информации;
е
— блок формирования модели внешней
среды;
ж
— блок планирования движения
Для штатных мобильных роботов (типа РТК-РП, «Ель-4» и т.д.), при-
меняемых для тушения пожаров, был разработан комплект модулей ин-
теллектуального управления. Использованы встраиваемые в штатные
системы управления наземными РТК модули, входящие в состав мобиль-
ной роботизированной группировки МЧС России, в целях повышения
эффективности работы операторов в дистанционном режиме управления
и обеспечения режимов автономного управления движением (рис. 6).
Разработанный комплект модулей интеллектуального управления
обеспечивает:
●
мониторинг рабочей среды, анализ опасных факторов и выявление
запретных зон движения;
●
автоматический возврат в зону уверенного радиообмена или
в точку старта в случае потери связи;
●
автоматическую конфигурацию манипулятора или иных рабочих
органов в транспортное, рабочее или иные положения.


