Состояние и перспективы развития наземных робототехнических комплексов
5
Это вызывает потребность создания новых форм и технических
средств информационного обеспечения, предоставляющих оператору
не только телевизионную и телеметрическую информацию о местопо-
ложении и статусе РТК в текущий момент времени, но и подробную
информацию о геометрических параметрах окружающей среды с на-
ложением на них результатов обнаружения целевых объектов и распо-
знавания источника опасности. Такая информация должна предостав-
ляться оператору в форме, обеспечивающей трехмерное моделирование
рабочей зоны с возможностью оперативного расчета и планирования
действий в условиях недетерминированной обстановки.
Данная информация должна использоваться в бортовом вычисли-
тельном комплексе для обеспечения высокоточной навигации и пози-
ционирования мобильного РТК при его автономном перемещении и вы-
полнении сложных технологических операций в труднодоступных мес
тах, помещениях и залах без привязки к спутниковым навигационным
системам, а также при движении по сложной пересеченной местности.
В настоящее время в МГТУ им. Н.Э. Баумана разрабатываются тех-
нологии виртуальной реальности. Полученные результаты могут иметь
практическое значение уже в настоящее время. В частности, они уже
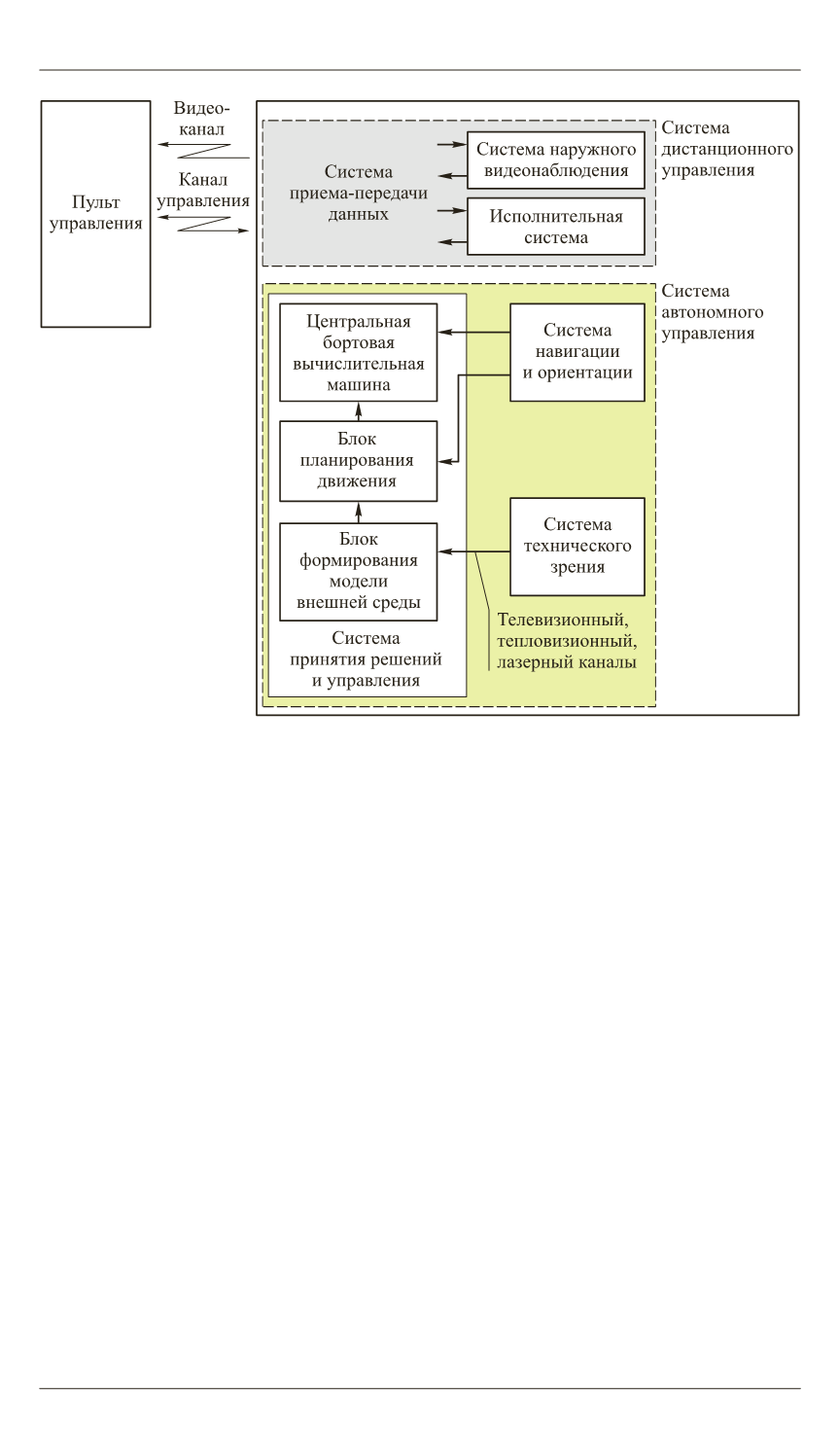
Рис. 1.
Обобщенная структурная схема САУД РТК


