














 8 / 16
8 / 16

Е.А. Лазутин, И.В. Чубарев
8
Инженерный журнал: наука и инновации
# 12·2017
Как следует из данных на рис. 2, представленные варианты струк-
турно идентичны, за исключением наличия дополнительного динами-
ческого звена — вариант II. При использовании только элеронов в ка-
честве управляющих органов системы снижения маневренных нагрузок
представленные выше структурные схемы (см. рис. 1, 2) упрощаются —
из них исключаются цепочки, связанные с формированием управляю-
щего сигнала на интерцепторы и сигнала компенсации на руль высоты
от интерцепторов (рис. 3).
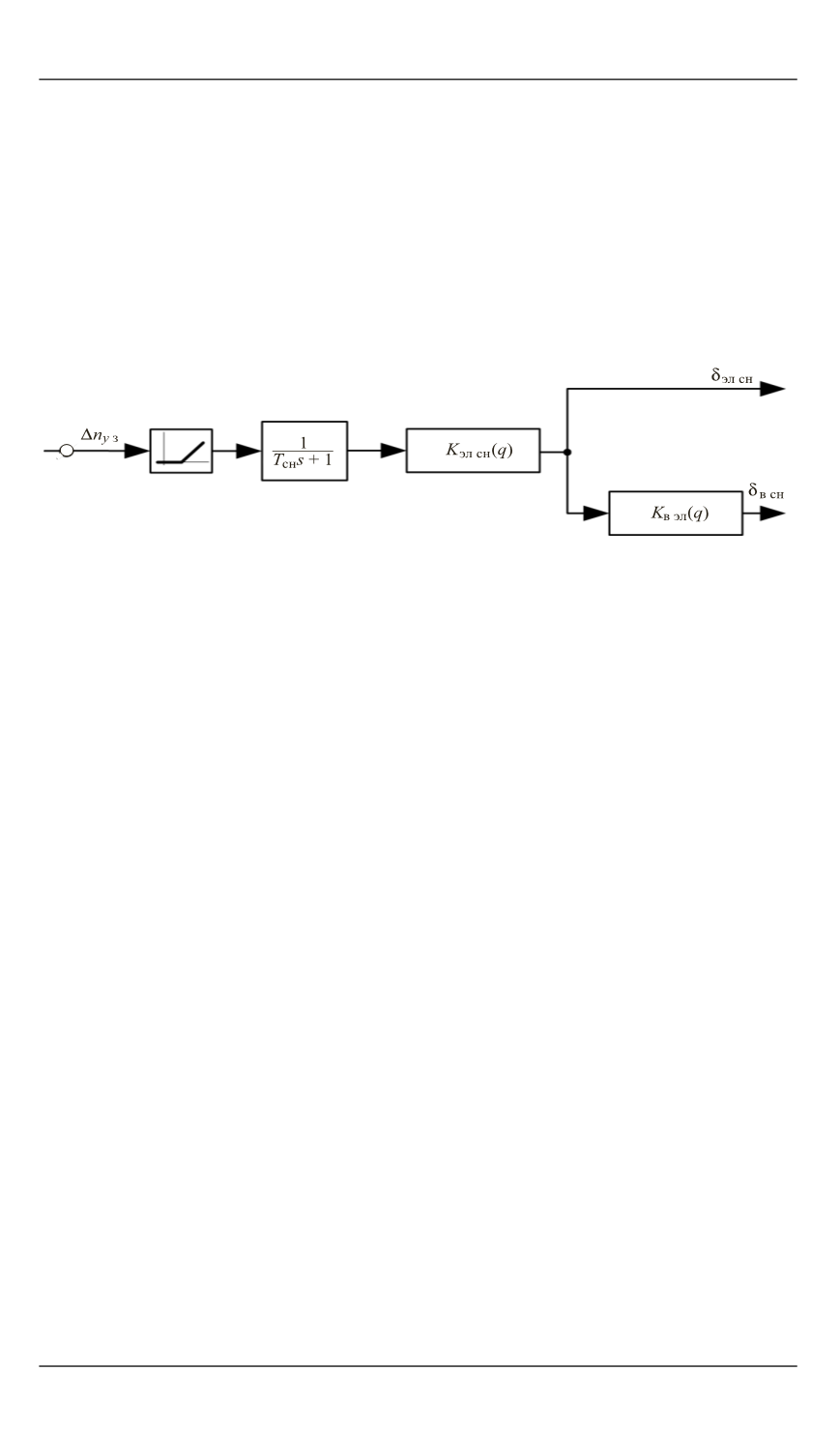
Рис. 3.
Структурная схема системы снижения маневренных нагрузок, работающей
по заданной перегрузке и использующей в качестве управляющих органов элероны:
∆
n
у
з
— заданное приращение нормальной перегрузки от летчика; δ
эл сн
— управляющий сиг-
нал на элероны от системы снижения нагрузок; δ
в сн
— сигнал компенсации на руль высоты
от элеронов;
K
эл сн
(
q
),
K
в эл
(
q
) — передаточные числа в канале элеронов и руля высоты, зави-
сящие от скоростного напора
q
Контур ручного управления продольным движением самолета
строится по принципу отработки системой управления заданного от
отклонения штурвала сигнала приращения нормальной перегрузки
∆
n
у
з
[7], поэтому в качестве управляющего сигнала системы сниже-
ния маневренных нагрузок целесообразно использовать именно та-
кой, а не сигнал фактической перегрузки, что, как было изложено
выше, автоматически решает вопросы, связанные с обеспечением
аэроупругой устойчивости системы.
Выбор управляющих органов системы снижения маневренных
нагрузок следует проводить с учетом не только их эффективности, но
и особенностей архитектуры силовой части системы управления и
надежности работы ее элементов. Так, согласно предписанию пункта
25.302 АМС CS-25 [8], при использовании функции системы снижения
маневренных нагрузок в системе дистанционного управления, рабо-
тающей в режиме основного управления, для снижения максимальных
эксплуатационных изгибающих моментов крыла вероятность отказа
должна составлять не более 10
–7
на 1 ч полета. Особенность архитек-
туры силовой части системы управления рассматриваемого объекта за-
ключается в том, что каждый интерцептор имеет по одному ЭГРП на
секцию, вероятность отказа которого оценивается на уровне порядка
10
–4
. При этом в случае отказа ЭГРП одной из секций интерцептора на
одной консоли крыла происходит автоматическое отключение соответ-