














 7 / 16
7 / 16

Проектирование системы снижения маневренных нагрузок…
Инженерный журнал: наука и инновации
# 12·2017 7
коэффициент по каналу элеронов
K
эл сн
и по каналу интерцепторов
K
инт сн
получается порядка 20…30 град/ед.
n
y
. При таких больших зна-
чениях коэффициентов необходимо принимать меры по предотвра-
щению неустойчивости контура разгрузки на частотах упругих коле-
баний самолета и нагружения конструкции при воздействии
ветровых порывов.
Вариант II.
Рассмотрим систему, в которой динамическое влия-
ние упругости конструкции на контур разгрузки исключается (рис. 2).
Особенностью этого варианта является организация работы путем со-
здания систем улучшения устойчивости и управляемости самолета,
которые могли бы обеспечивать заданный градиент расхода ручки по
тангажу на единицу перегрузки
в з
.
y
n
X
Тогда интерцепторы или элеро-
ны можно отклонять не по фактическому сигналу перегрузки, а по за-
данному:
з
в в з
/
.
y
n
y
n Х X
Поскольку при этом элероны и интерцепто-
ры отклоняются по сигналу, не связанному с параметрами движения
самолета, то вопросы аэроупругой устойчивости рассматриваемого
варианта системы решаются сравнительно просто. Основной задачей
при выборе параметров настройки является выбор постоянной време-
ни фильтра
T
сн
, которая бы обеспечивала отсутствие заброса
в изгибающем моменте при выходе на заданную перегрузку.
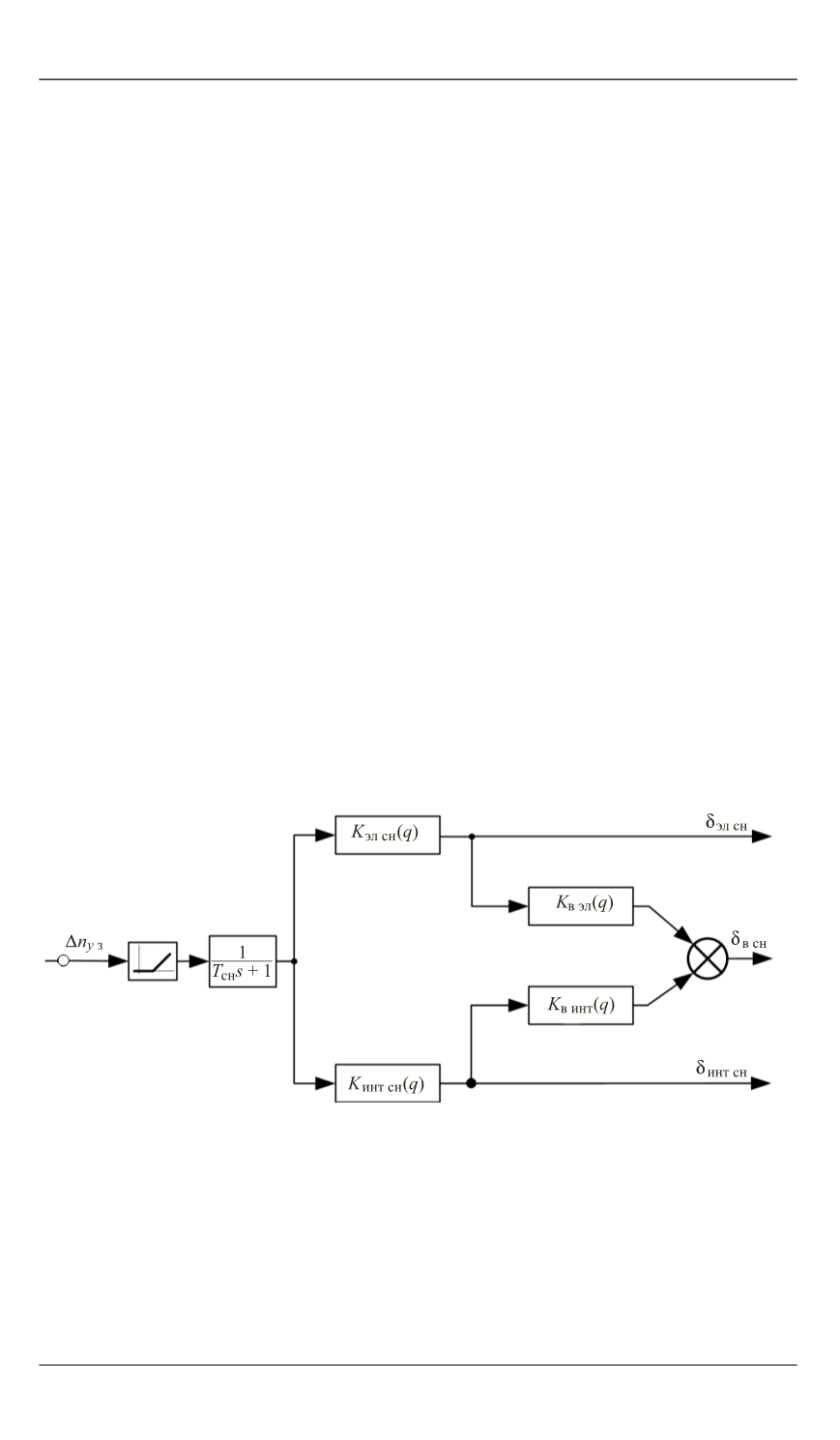
Рис. 2.
Структурная схема системы снижения маневренных нагрузок, работаю-
щей по заданной перегрузке и использующей в качестве управляющих органов
элероны + интерцепторы:
∆
n
у
з
— заданное приращение нормальной перегрузки от летчика; δ
эл сн
— управляющий сиг-
нал на элероны от системы снижения нагрузок; δ
инт сн
— управляющий сигнал на интерцеп-
торы от системы снижения нагрузок; δ
в сн
— сигнал компенсации на руль высоты от элеро-
нов и интерцепторов;
K
эл сн
(
q
),
K
инт сн
(
q
),
K
в эл
(
q
),
K
в инт
(
q
) — передаточные числа в канале
элеронов, интерцепторов и руля высоты, зависящие от скоростного напора
q