














 3 / 12
3 / 12

Метод расчета параметров маневров при осуществлении космического полета…
Инженерный журнал: наука и инновации
# 7·2017 3
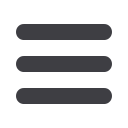
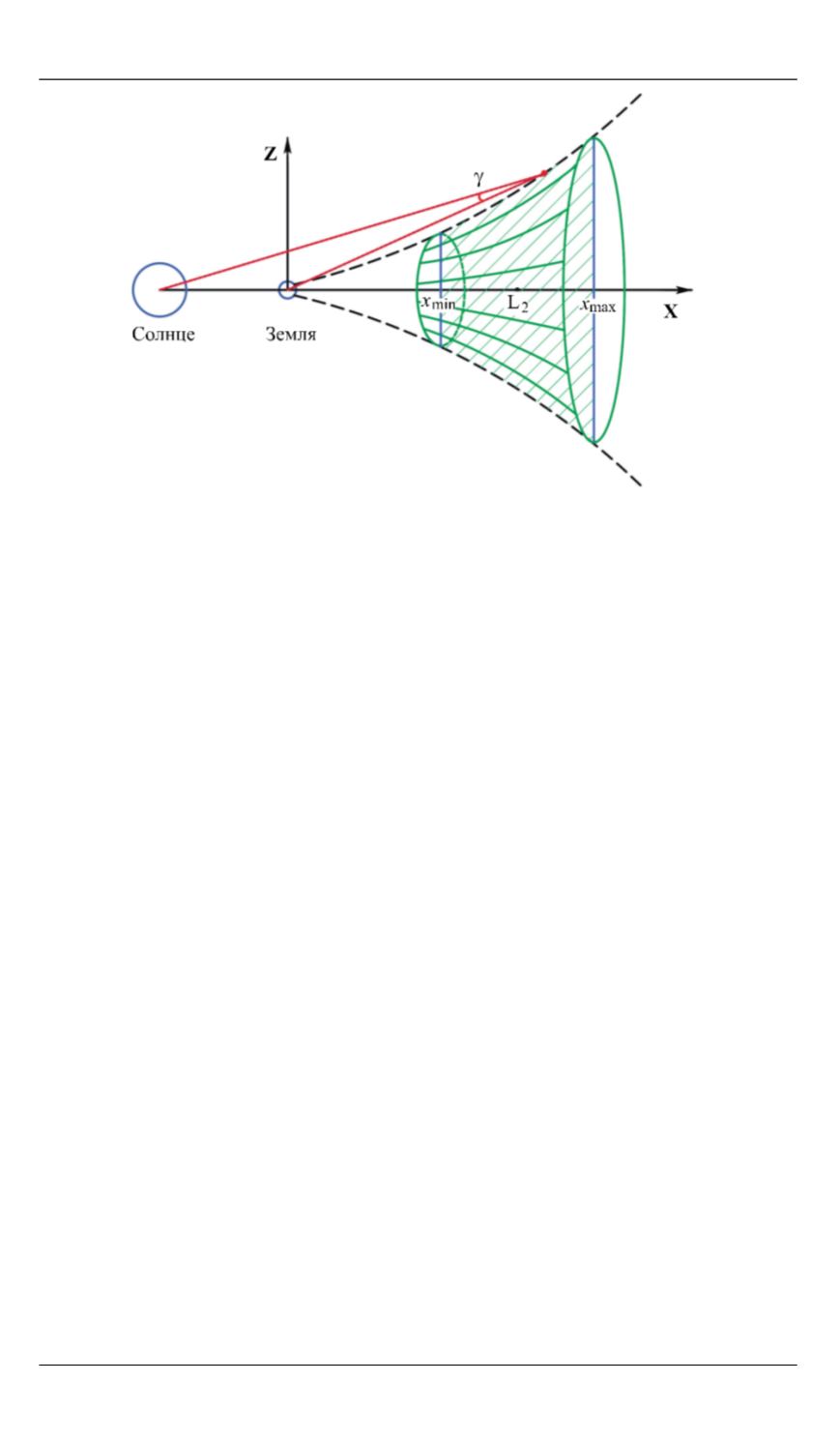
Рис. 1.
Общий вид области удержания космического аппарата
в окрестности точки либрации
При выборе стратегии маневрирования предложено не придер-
живаться некоторой заранее рассчитанной номинальной траектории,
а вместо этого использовать принцип «мягкого» удержания КА в за-
данной области. Согласно предлагаемому подходу, параметры ма-
невра, осуществляемого в заданный фиксированный момент времени,
должны максимизировать время
T
пребывания КА в заданной
окрестности точки либрации. Опыт реализации других космических
проектов в окрестности точек либрации позволяет предполагать, что
данный подход приведет к уменьшению общих топливных затрат на
поддержание траектории, одновременно обеспечив выполнение всех
поставленных требований [4].
Таким образом, базовая задача заключается в определении пара-
метров корректирующего маневра, проводимого в заданный момент
времени
м
t
и обеспечивающего максимальное значение
T
. При этом
на этапе перелета значение
T
считается от момента времени
in
t
вхо-
да в заданную область до момента времени
out
t
выхода из заданной
области, если КА уже находится в заданной области — от момента
м
t
до момента
out
.
t
При переходе к математической постановке предпочтительно по-
лучить оптимизационную задачу с простыми ограничениями, в связи
с чем выбрано, что параметры корректирующего маневра однозначно
задаются в форме трехкомпонентного вектора
, , ,
V
где
—
угол, определяющий направление проекции импульса в плоскости
OYZ
,
0
2
. Схема измерений значений
и
во вращающейся
системе координат представлена на рис. 2.