














 4 / 10
4 / 10

И.Н. Абезяев,
А.В. Андреяненкова, П.Е. Величко, А.И. Поцеловкин, Д.В. Фокин
4
Инженерный журнал: наука и инновации
# 5·2017
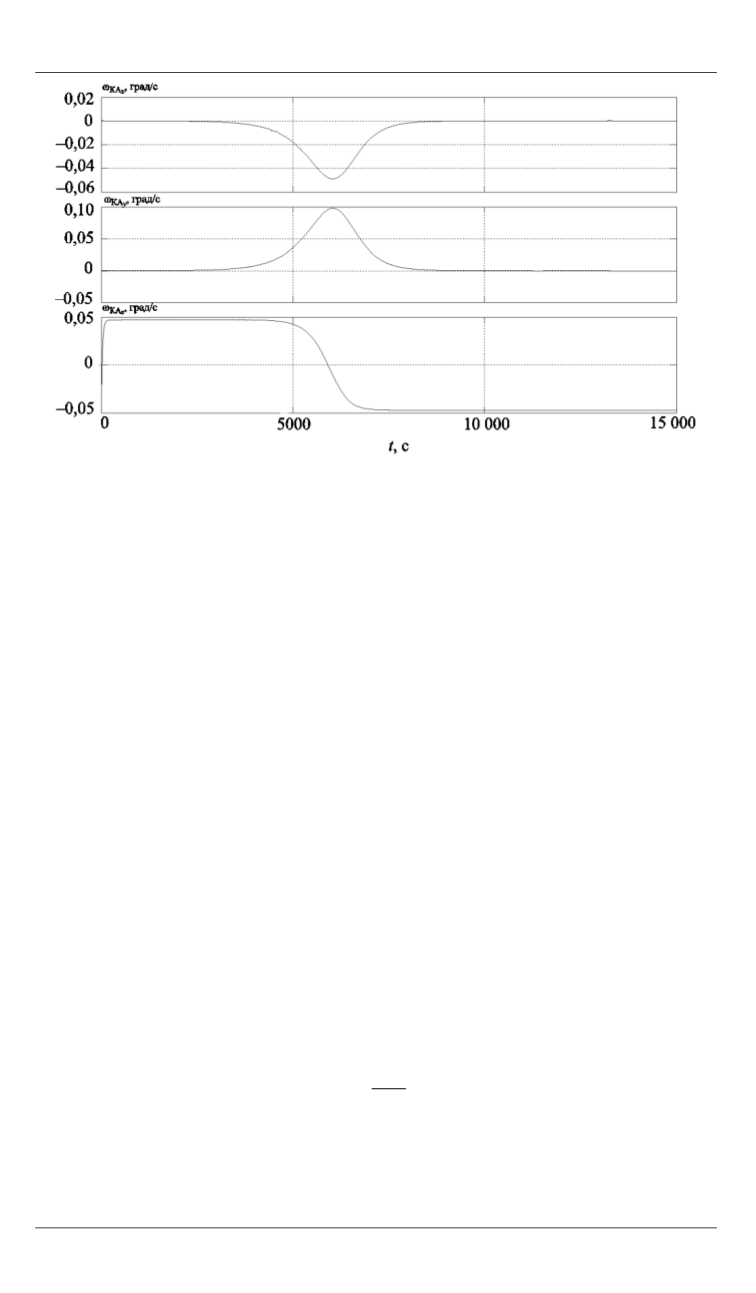
Рис. 3.
Графики изменения угловых скоростей КА
в режиме «классического» ОГК
Устранить указанный недостаток поможет разработка нового
способа ВКО с изменением системы уравнений (1) и преобразовани-
ем структурной схемы, приведенной на рис. 1.
Способ программного поворота.
Для сокращения времени и
улучшения качества переходных процессов в системе предлагается
применить способ программного поворота, развитый в работе [9] и
специально доработанный под задачу ВКО КА. Структурная схема
ОГК для этого случая приведена на рис. 4.
В структурную схему введен ключ К, который замыкается в мо-
мент начала программного поворота. После восстановления верти-
кальной ориентации КА по сигналам ПОЗ информация о его стаби-
лизации передается в контур ОГК по каналам крена, курса и тангажа.
При этом в системе по сигналам ПОЗ включаются контуры кор-
рекции ОГК по крену и по тангажу, а контур коррекции ОГК по кур-
су не включается (см. рис. 4, ключ К разомкнут). Таким образом, КА
остается в положении, стабилизированном относительно вертикали
места, но в произвольном и стабилизированном относительно ОСК
положении по курсу. В этом положении измеряются показания
БГИУС по каналам крена и тангажа и оценивается положение КА по
курсу относительно ОСК, например, по формуле
ˆ аrcs in .
X
ω
ψ =
Ω
(2)
Данная оценка курсового угла запоминается и принимается за ве-
личину программного поворота КА по курсу
пр
ˆ
(
)
ψ = ψ
, на который
следует его повернуть для приведения в плоскость орбиты.