














 4 / 16
4 / 16

Г.А. Тимофеев, И.Е. Люминарский, Е.С. Люминарская
4
Инженерный журнал: наука и инновации
# 5·2017
2
1ф 2
0
2
2
2
с
1
к
3
( )
,
2
U r
M s
М
r
s r
x
s
′
=
−
′
ω ( (
(1)
где
c
c
n n
s
n
− =
— коэффициент скольжениея;
с
с
30
n
ω = π
— син-
хронная угловая скорость (угловая скорость вращения магнитного
поля статора);
0
М
— механический момент холостого хода.
Первое слагаемое представляет собой электромагнитный момент,
второе слагаемое
0
(
)
М
−
учитывает механические потери электродви-
гателя. Момент
0
М
вычисляется через номинальный момент
н
M
[7]:
0
н
( 1)
M M
= ξ −
,
где
1, 02 1,10.
ξ =
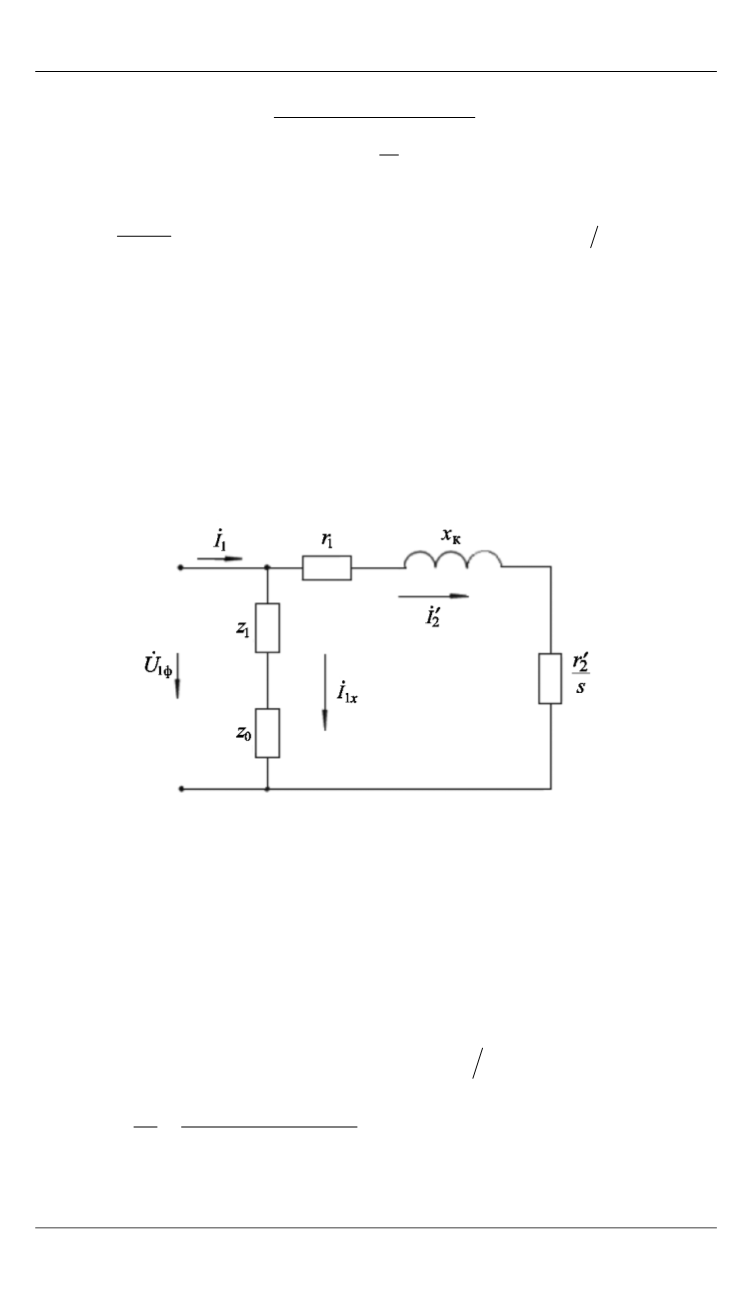
Рис. 3.
Г-образная схема замещения одной фазы
асинхронного двигателя
При использовании Г-образной схемы замещения затраченную
мощность
1
P
, электромагнитную мощность
эм
,
P
КПД
дв
η
и коэффи-
циент мощности
1
cos
ϕ
электродвигателя вычисляли по следующим
зависимостям [7]:
2
1ф 1
2
1
1ф 1
1 эм
2
2
эм 0 с
дв
1
1
1
3 cos ;
3
;
(
)(1 ) ; cos
cos(
),
U I
P U I
P I r s
P P M s
P
P
=
ϕ
= ′ ′
− ω −
η = =
ϕ = ϕ − ϕ
(2)
где
2 1
,
P P
— полезная и затраченная мощности электродвигателя.