














 5 / 15
5 / 15

Алгоритм выбора коэффициентов пропорционального метода наведения…
Инженерный журнал: наука и инновации
# 9·2016 5
ограничивает область целей, которые можно поразить. Также счита-
ем, что цель достигнута, если промах не превышает допустимого
значения. Для поставленной задачи рассматриваем метод пропорци-
онального наведения с постоянными значениями коэффициентов
наведения. Определим технически возможную область достижения
цели, для этого отклоним и зафиксируем в предельное положение
рули и получим максимально возможные точки падения.
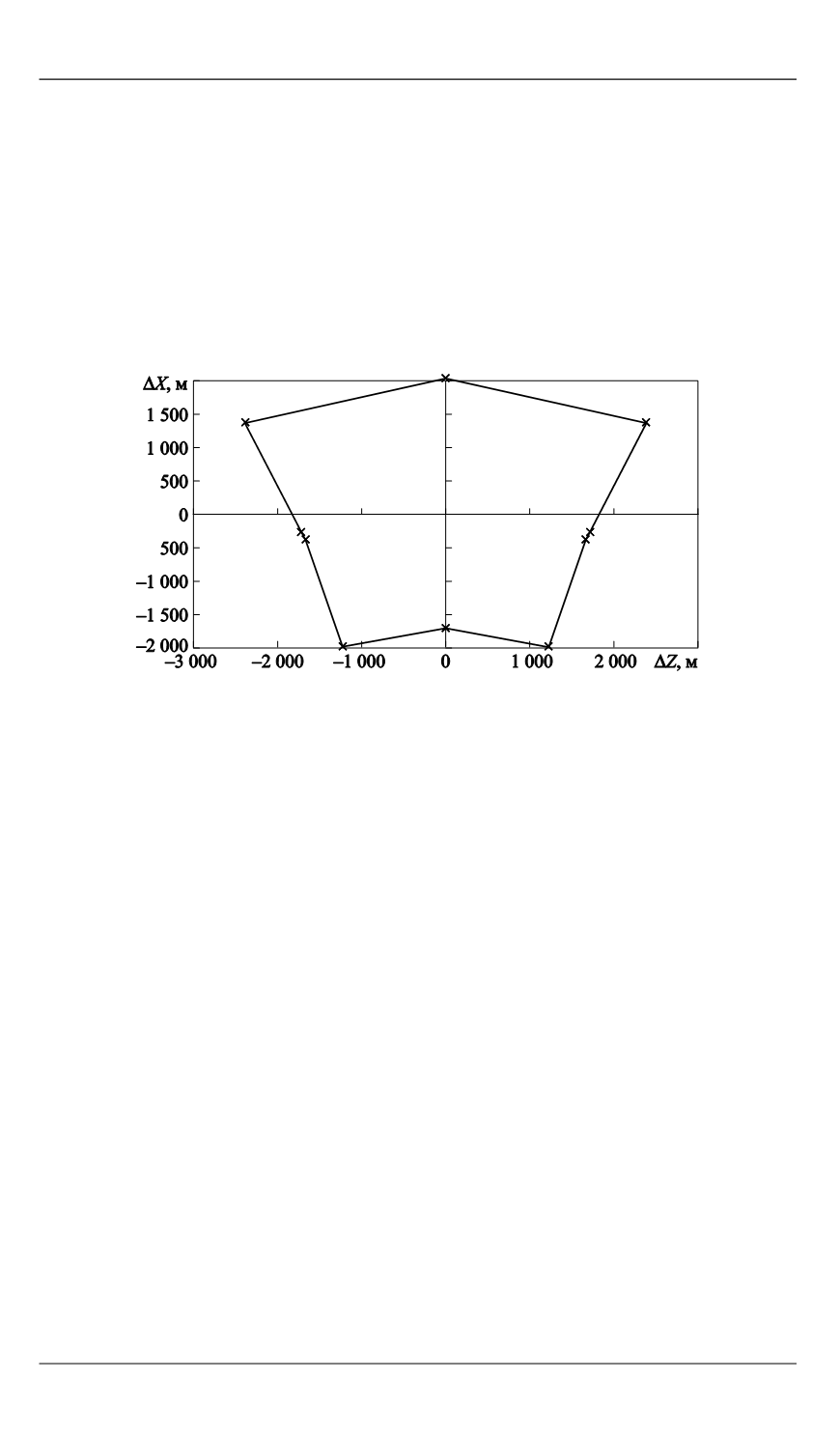
Полученная зона технически возможного достижения цели пред-
ставлена на рис. 2.
Рис. 2.
Зона технически возможного достижения цели
Поскольку
ОY
не имеет вращения вокруг оси
О
Δ
Х
, то зона пора-
жения симметрична относительно оси
ОХ
. Большая часть зоны нахо-
дится при положительных значениях Δ
Х
, т. е. когда цель расположе-
на впереди точки падения
ОY
без наведения.
Исследуем теперь зоны достижения цели при различных коэф-
фициентах наведения. Для этого поочередно зафиксируем значения
одного из коэффициентов и, изменяя значения второго коэффициен-
та, получаем области поражения цели и их взаимное положение.
Получены зоны поражения цели для постоянного значения коэф-
фициента
K
φ
= 10 и различных значениях коэффициента
K
χ
,
равных
0,5; 0,6; 0,7 и 0,8 (рис. 3).
На рис. 3 видно, что полученные зоны представляют собой эл-
липсы и по размеру меньше номинальной зоны. При коэффициентах
K
χ
= 0,5 и 0,6 зоны сплошные, при б
î
льших значениях происходит
образование «разрыва» зоны — образование внутри области мест,
где цель не будет поражена. Назовем центром области достижения
точку, образованную пересечением наибольших дистанций пораже-
ния по осям Δ
XO
и Δ
ZO
. Увеличение коэффициента
K
χ
приводит к
смещению центра области достижения по оси Δ
XO
к меньшим значе-
ниям, увеличению диапазона по оси Δ
Z
и сужению зоны поражения
при K
χ
> 0,6.