














 6 / 8
6 / 8

С.П. Симаков, Е.В. Устюгов
6
Инженерный журнал: наука и инновации
# 7
2016
будем измерять движение второго наноспутника — активного. В каче-
стве модели, определяющей угловое движение наноспутника, использу-
ем модель движения относительно центра масс [6].
Начальными условиями моделирования являются:
1)
высота полета
= 380км,
H
орбита — круговая;
2)
моменты инерции наноспутников
2
= 0,0146 кг м ;
n
I
=
x
I
2
= 0,00405 кг м ;
3)
угловые скорости разделения
= 4 град/с,
n
= 0 град/с.
x
Обратную задачу решали для интервала 0…10 с после отделения.
На более длинном интервале времени точность алгоритма падает
вследствие увеличения расстояния между наноспутниками (рис. 5).
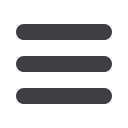
Рис. 5.
К решению задачи ориентации:
сплошная линия
— модельные параметры;
—
;
—
;
—
(восстановленные параметры)
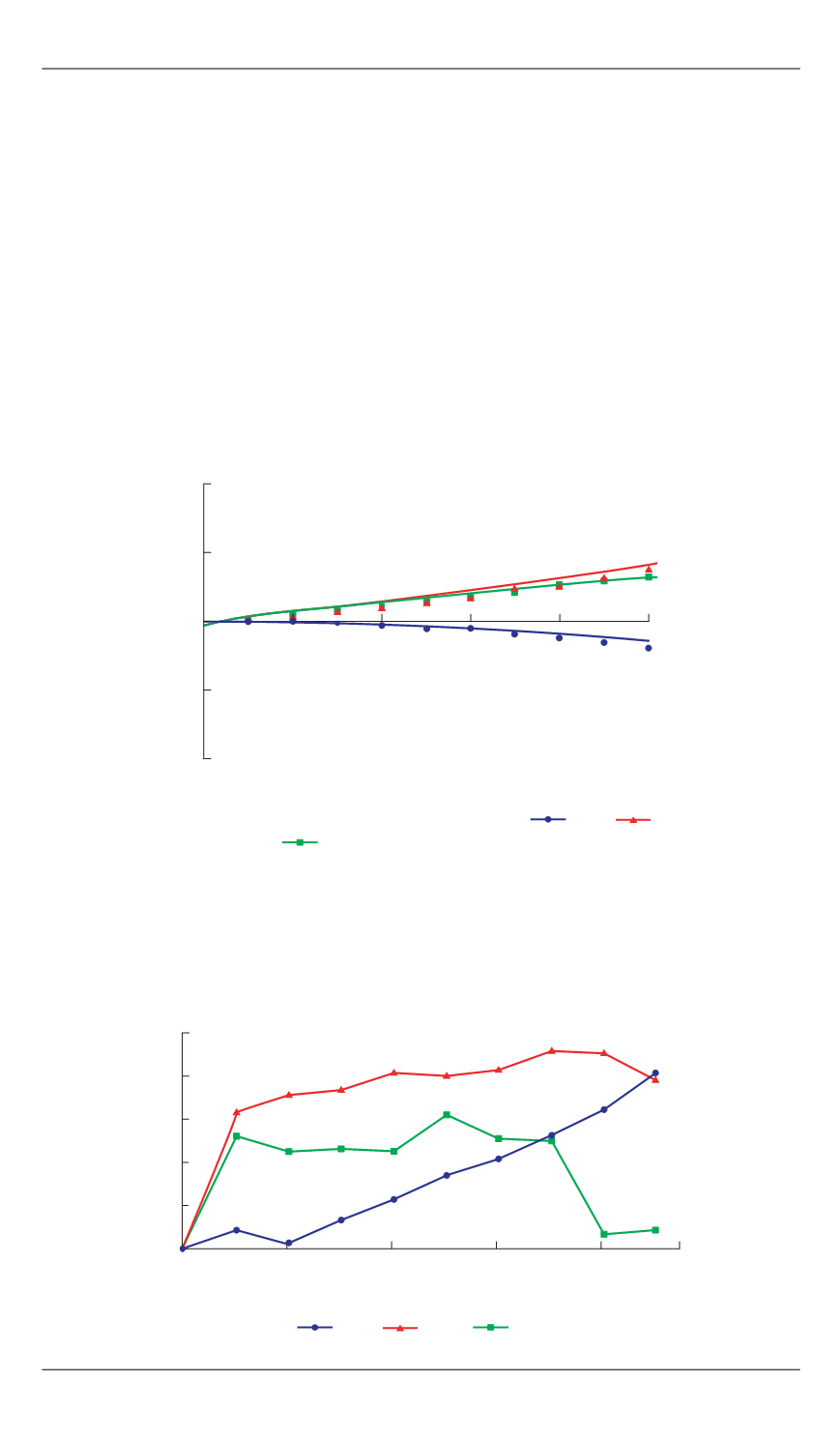
Оценим точность этого решения. Ошибки по углам ориентации
представлены на рис. 6, откуда можно сделать вывод, что точность
решения уменьшается при отдалении камеры от рассматриваемого
объекта. Максимальная и средняя ошибки представлены в табл. 2.
Рис. 6.
Ошибки решения задачи:
—
;
—
;
—
, рад
2
4
6
8
t
, с
1
0
1
2
, рад
t
, с
0,08
0,06
0,04
0,02
0
2
4
6
8