














 5 / 8
5 / 8

Оценка точности алгоритма видеонавигации
Инженерный журнал: наука и инновации
# 7
2016
5
2
2
;
;
( 1)
( 1)
i
i
i
d
d
d
M
D
n
n n
n n
(3)
где
n
— число экспериментов;
M
— математическое ожидание,
град/с;
D
— дисперсия,
2 2
град / с ;
— среднее квадратичное откло-
нение, град/с;
i
d
— ошибка угловой скорости, град/с.
Моментные характеристики составляющих вектора угловой ско-
рости представлены в табл. 1.
Таблица 1
Значения моментных характеристик
Составляющие
вектора угловой
скорости
М
, град/с
D
, град
2
/с
2
,
град/с
x
0,10
3,5
5
10
0,012
y
0,20
1,17
4
10
0,010
z
0,14
6,3
5
10
0,021
Приведенные значения показывают хорошую точность алгоритма
при решении навигационной задачи.
Численный эксперимент по разделению двух наноспутников.
Рассмотрим еще одну задачу об определении кинематических пара-
метров в космическом пространстве. Имеем два наноспутника стан-
дарта CubeSat 3U [5]. На одном наноспутнике установлена видеока-
мера, на поверхности второго имеется набор цветных реперов.
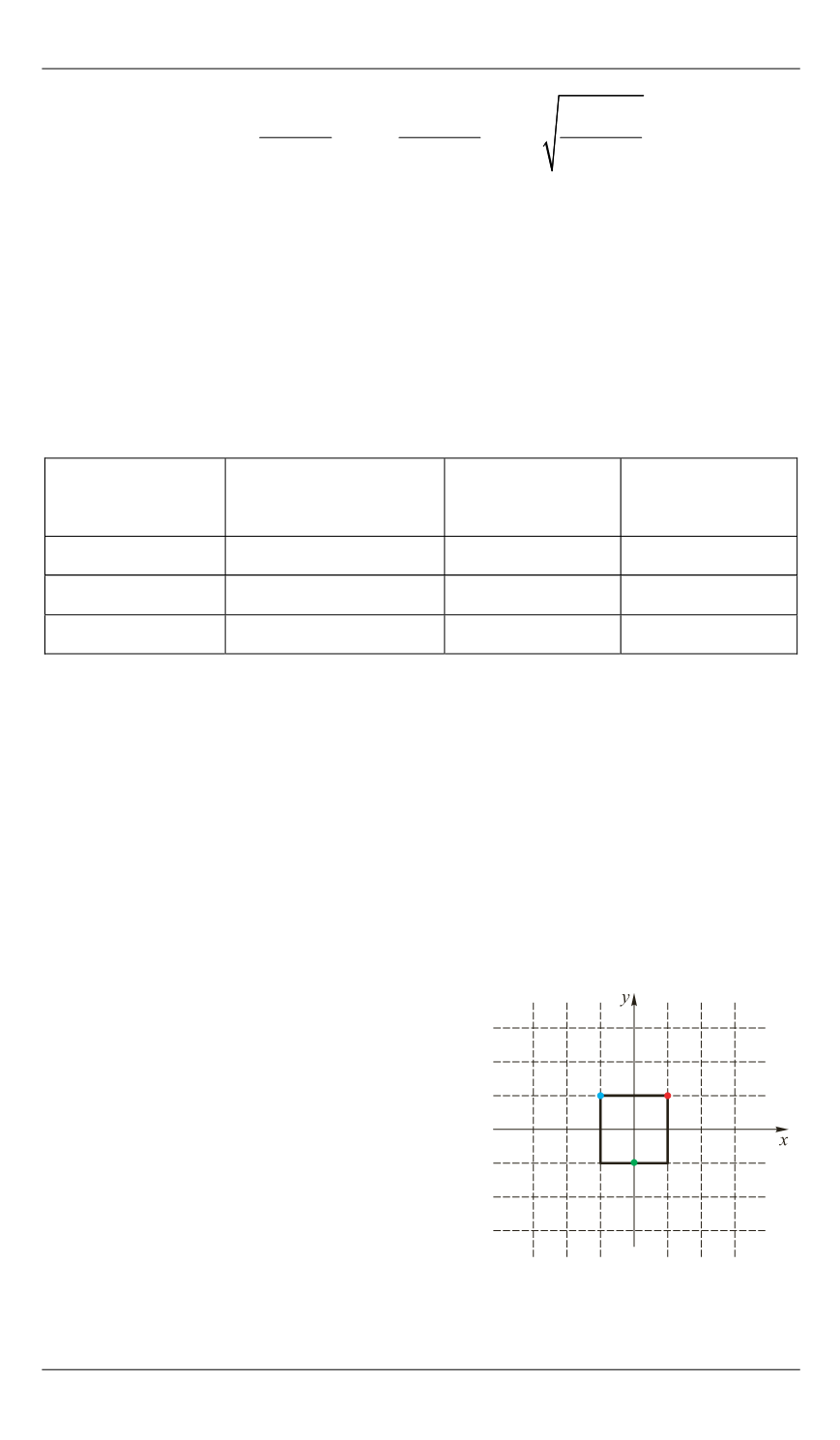
В определенный момент наноспутники разделяются. Камера первого
наноспутника фиксирует положение реперов в каждом кадре полу-
чившегося видеоизображения (рис. 4). По известным проекциям ре-
перов на плоскости матрицы с помощью
алгоритма видеонавигации становится
возможным восстановить относитель-
ную ориентацию второго наноспутника
в каждом кадре видеоизображения. Для
определения относительного положения
были получены аналитические соотно-
шения, связывающие координаты репе-
ров на плоскости матрицы с коорди-
натами центра масс наблюдаемого нано-
спутника.
Примем первый наноспутник в ка-
честве пассивного и относительно него
Рис. 4.
Положение реперов
в кадре