














 2 / 8
2 / 8

С.П. Симаков, Е.В. Устюгов
2
Инженерный журнал: наука и инновации
# 7
2016
модельные значения пиксельных коор-
динат, которые сравниваются с реаль-
ными координатами.
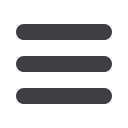
Поиск новых значений прекраща-
ется по достижении заданной точности
реальных и смоделированных значе-
ний. Найденные параметры ориента-
ции выступают в качестве начальных
условий для моделирования движения
относительно центра масс. Получен-
ные с помощью модели значения будут
использоваться в качестве начального
приближения для алгоритма на следу-
ющем шаге (рис. 1).
Численный эксперимент по опре-
делению угловых скоростей орби-
тальной ступени ракеты-носителя
«Союз».
При рассмотрении численного
эксперимента по нахождению угловых
скоростей орбитальной ступени ракеты-
носителя «Союз» предполагалось, что
орбитальная ступень в переходном от-
секе несет контейнер с наноспутником,
который после отделения основной по-
лезной нагрузки, но до срабатывания
сопла увода ступени также отделяется
от ступени. Наноспутник отделяется по
продольной оси орбитальной ступени,
при этом собственные угловые скоро-
сти наноспутника, сообщаемые при от-
делении от ступени, не учитывались.
В работе [4] показано, что орбитальная
ступень после отделения основной по-
лезной нагрузки совершает регулярную
прецессию (рис. 2).
Параметры, изображенные на рис. 2,
можно найти по следующим выраже-
ниям:
2
2
0
0
0
;
n
y
z
2
2
0
0
0
0 0
0
0
,
,
;
n
n n
x
x x
x
n
K I
K I
K K K
(1)
Рис. 1.
Блок-схема алгоритма
относительной видеонавигации
Начало
Обработчик
изображений
Ввод
данных
X Y
i i
,
X Y
i i
,
x y z
ij ij ij
, , ;
Нет
Нет
Да
Расчет
пиксельных
координат
i N
Генерация
значений
, ,
f
;
, , ;
, ,
i
i
i
1
1 1
,
,
x y z
0
,
,
;
0 0
f f f
x y z
, , .
Вычисление
<
зад
Вычисление
X Y Z
c c c
, ,
Расчет
начального
приближения
на (
)-мшаге
i
+ 1
Модель
движения
относительно
центра масс
Вывод
результатов
Конец
X Y Z
c c c
, ,
Да