
















 18 / 31
18 / 31

В.А. Воронцов, А.М. Крайнов, Е.В. Власенков, П.С. Черников, Т.Ш. Комбаев, А.Е. Шаханов
18
Инженерный журнал: наука и инновации
# 5·2016
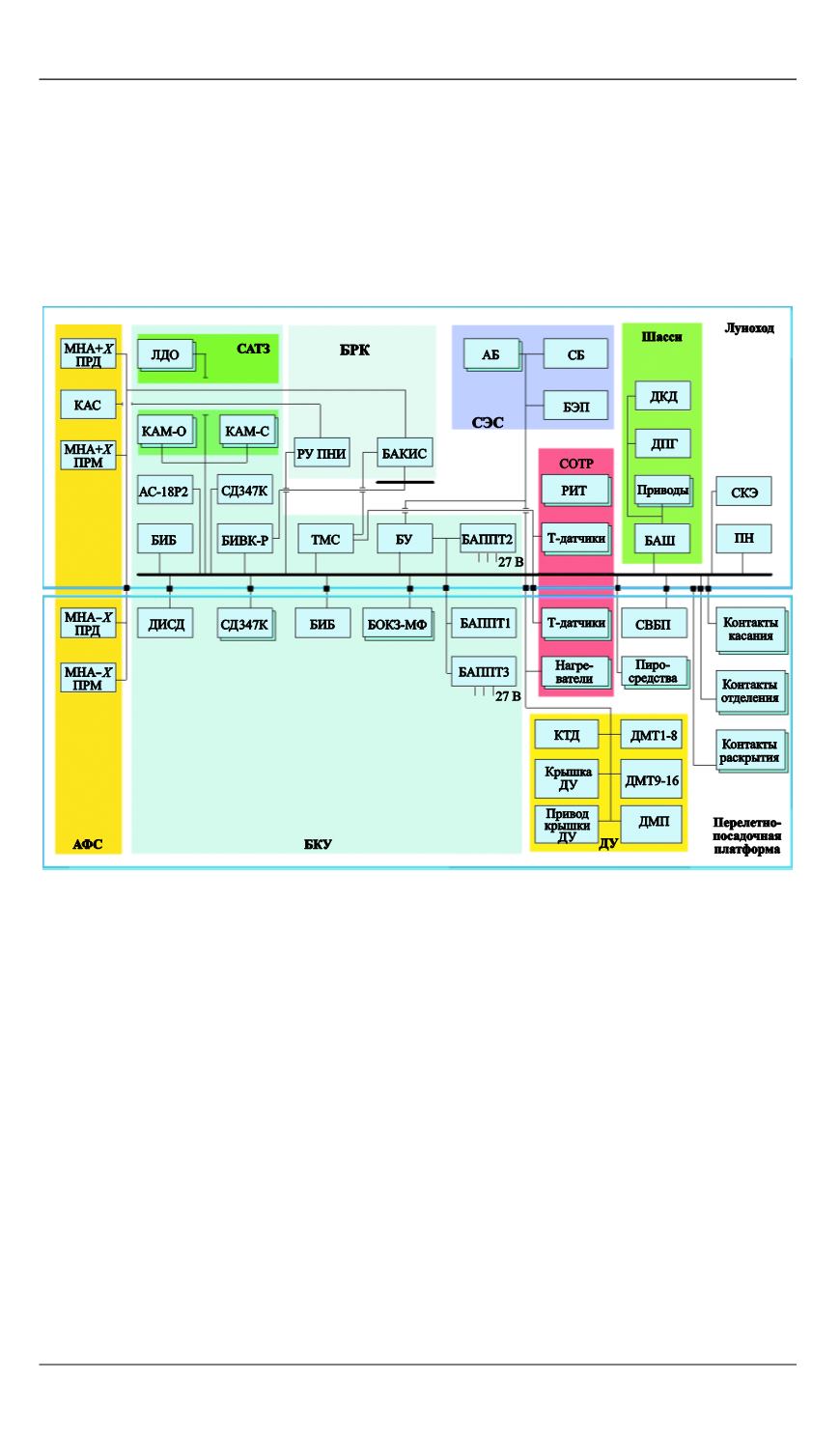
ные датчики; КТД — корректирующий тормозной двигатель; ДУ —
двигательная установка; ДМТ — двигатель малой тяги; ДМП — дви-
гатель маневрирования и посадки; ДКД — датчик крена и дифферен-
та; ДПГ — датчик прочности грунта; БАШ — блок автоматики шас-
си; СВБП — система высокоточной и безопасной посадки; СКЭ —
система контроля электризации; ПН — полезная нагрузка.
Рис. 9.
Схема размещения и связи бортовой аппаратуры КА ЛХ
Предложения по проектному облику КА с луноходом.
Проект-
ный облик лунохода, перелетно-посадочной платформы, их взаимное
расположение в составе КА ЛХ, тактико-технические характеристики
лунохода разработаны в соответствии со схемой размещения и связи
бортовой аппаратуры КА ЛХ, а также с результатами проработки
каждой из систем КА ЛХ.
Проектный облик лунохода.
Основным требованием, влияющим
на геометрические характеристики лунохода, является необходи-
мость размещения определенного приборного оборудования служеб-
ных систем и максимально возможного состава целевой аппаратуры
для решения актуальных задач по исследованию поверхности Луны.
В связи с тем что габаритные размеры целевой аппаратуры в
настоящее время не определены, компоновочная схема лунохода