
















 7 / 23
7 / 23

О некоторых особенностях поиска оптимального управления …
Инженерный журнал: наука и инновации
# 3
⋅
2016 7
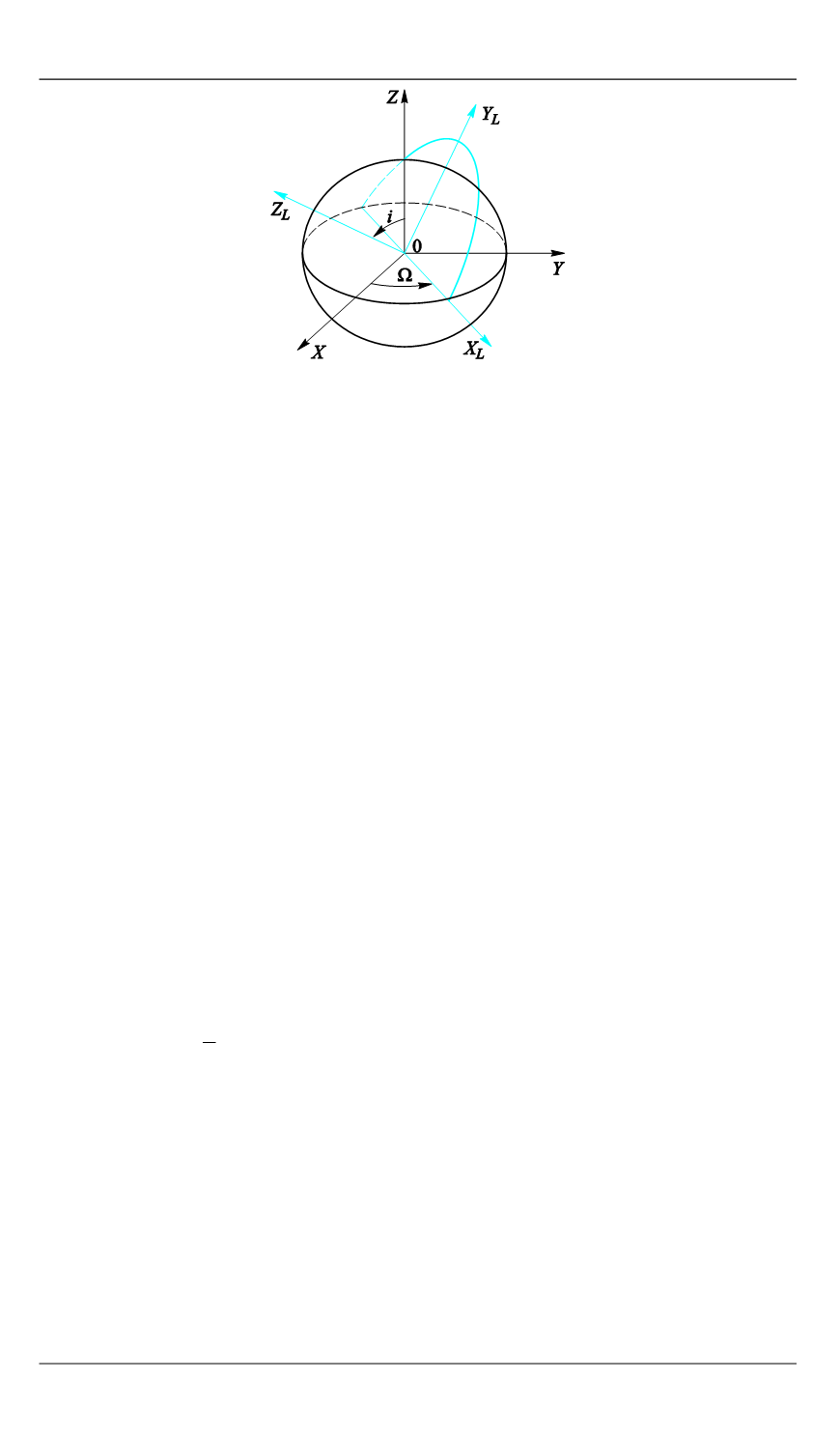
Рис. 2.
Взаимное расположение ВСК и АГЭСК
Векторный интеграл (14) в проекции на оси данной системы
координат запишется в виде следующих соотношений:
( ) ( )
( ) ( )
( )
( )
( )
( )
−
+
−
≡
z
y
L zL
L yL
yL V L
zL V L
xL
y t p t z t p t V t p t V t p t
K
, (15)
( ) ( )
( ) ( )
( )
( )
( )
( )
−
+
−
≡
x
z
L xL
L zL
zL V L
xL V L
yL
z t p t x t p t V t p t V t p t
K
, (16)
( ) ( )
( ) ( )
( )
( )
( )
( )
−
+
−
≡
y
x
L yL
L xL
xL V L
yL V L
zL
x t p t
y t p t V t p t V t p t
K
. (17)
Выражение (17) отражает условие трансверсальности по угловой
дальности межорбитального перехода [4]. Так как на угловую дальность
в рассматриваемой задаче ограничение не накладывается, то константу
zL
K
можно конкретизировать:
0.
=
zL
K
Применение выбранной вспо-
могательной системы координат имеет дополнительные преимущества
при определении соотношений между начальными векторами сопря-
женных переменных для симметричных межорбитальных переходов.
Переход между АГЭСК и ВСК осуществляется с помощью двух
поворотов: по долготе восходящего узла и наклонению. Матрица
перехода имеет следующий вид:
АГЭСК
A
ВСК
cosΩ sin Ω 0
cos sin Ω cos cosΩ sin
sin sin Ω sin cosΩ cos
i
i
i
i
i
i
= −
−
. (18)
Очевидно, что переход в сопряженных координатах выражен
матрицей перехода, аналогичной (18), что вызвано следующими
соображениями. Запишем полный дифференциал функционала
I
в
АГЭСК и ВСК:
АГЭСК
ВСК
;
.
x
y
z
xL
yL
zL
x
y
z
V x
V y
V z
m
xL L yL L zL L V xL V yL V zL m
dI
p x p y p z p V p V p V p m
dI
p x p y p z p V p V p V p m
= ∂ + ∂ + ∂ + ∂ + ∂ + ∂ + ∂
= ∂ + ∂ + ∂ + ∂ + ∂ + ∂ + ∂