














 9 / 12
9 / 12

Исследование точностных характеристик комплекса алгоритмов…
Инженерный журнал: наука и инновации
# 3
2016 9
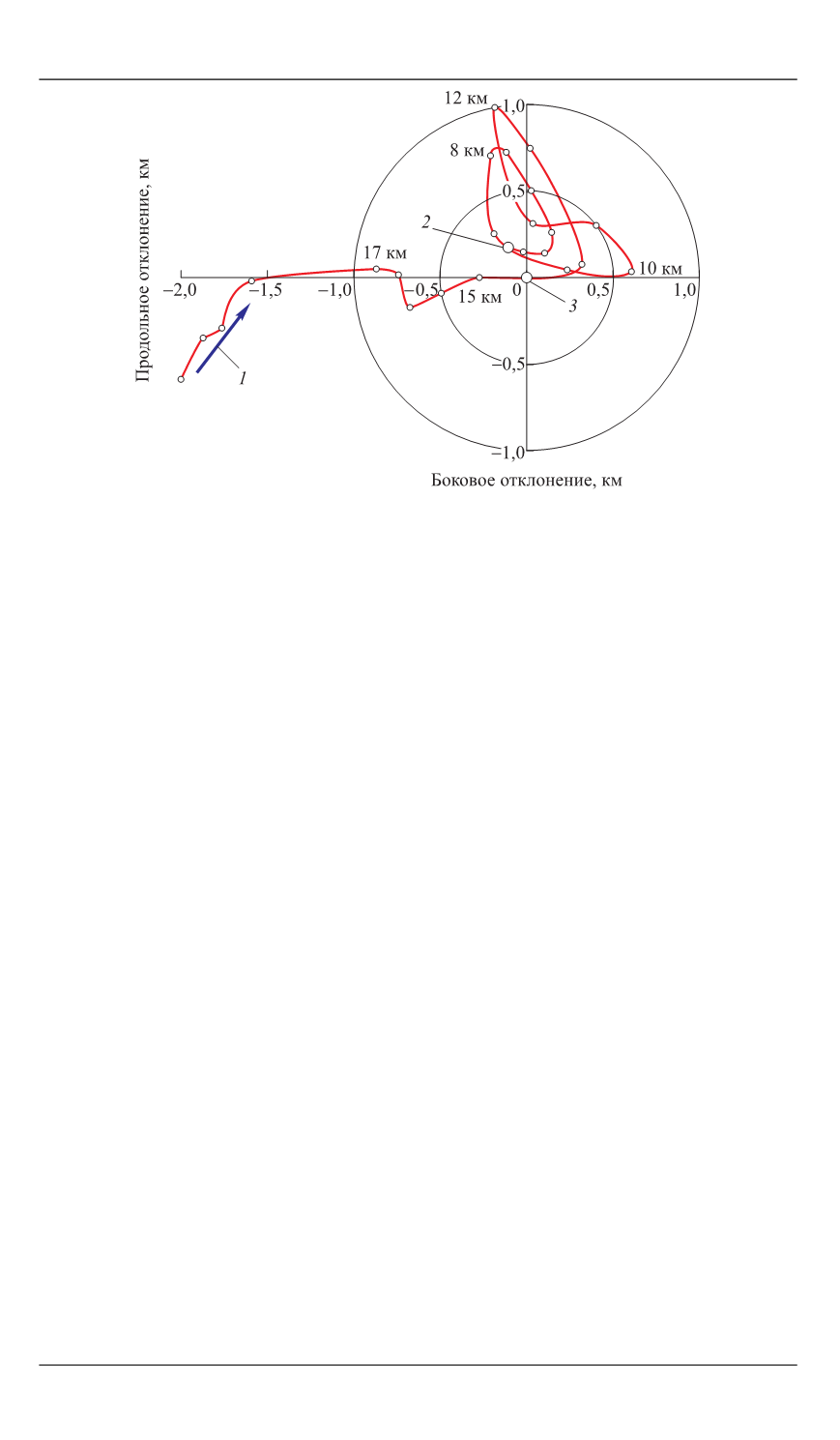
Рис. 9.
Пример реализации траектории движения прогнозируемого в алгоритме
наведения центра зоны маневра ВА (завершающий участок наведения):
1
— высота 20 км;
2
— высота 5 км, окончание наведения;
3
— прицельная точка
Заключение.
Комплекс разработан с учетом результатов иссле-
дований особенностей динамики движения ВА скользящего типа на
конечном участке спуска. Учтен опыт практической работы по бал-
листико-навигационному обеспечению спусков транспортных пило-
тируемых кораблей типа «Союз» различных модификаций. Результа-
ты численного статистического моделирования процесса управления
спуском показывают, что отклонение ВА от прицельной точки на
момент начала работы системы мягкой посадки не превышает задан-
ной допустимой величины 1 км.
ЛИТЕРАТУРА
[1]
Охоцимский Д.Е., Голубев Ю.Ф., Сихарулидзе Ю.Г.
Алгоритмы управле-
ния космическим аппаратом при входе в атмосферу
. Москва, Наука, 1975.
[2]
Сихарулидзе Ю.Г.
Баллистика летательных аппаратов
. Москва, Наука,
1982.
[3]
Ярошевский В.А.
Вход в атмосферу космических летательных аппаратов
.
Москва, Наука, 1988.
[4]
Андреевский В.В.
Динамика спуска космических аппаратов на Землю
.
Москва, Машиностроение, 1970.
[5]
Кудрявцев С.И. Комплексный баллистический анализ проблем высокоточ-
ного управления спуском перспективного пилотируемого корабля в атмо-
сфере Земли.
Космонавтика и ракетостроение
, 2015, № 1 (80), с. 5–13.
[6]
Беренов Н.К., Бранец В.Н., Евдокимов С.Н., Климанов С.И., Комарова Л.И. и
др. Система управления спуском космического аппарата «Союз ТМА».
Ги-
роскопия и навигация
, 2004, № 3 (46), с. 5–13.