














 5 / 12
5 / 12

Исследование точностных характеристик комплекса алгоритмов…
Инженерный журнал: наука и инновации
# 3
2016 5
посредством введения в алгоритм зоны нечувствительности.
Существует возможность ограничения величины максимальной
перегрузки. Упрощенная схема алгоритма наведения представлена на
рис. 3. Зависимость углового рассогласования δ-направления из
центра зоны маневра на заданную точку с продольной осью зоны
маневра (параметр, используемый для выбора величины командного
угла крена) от высоты показана на рис. 4.
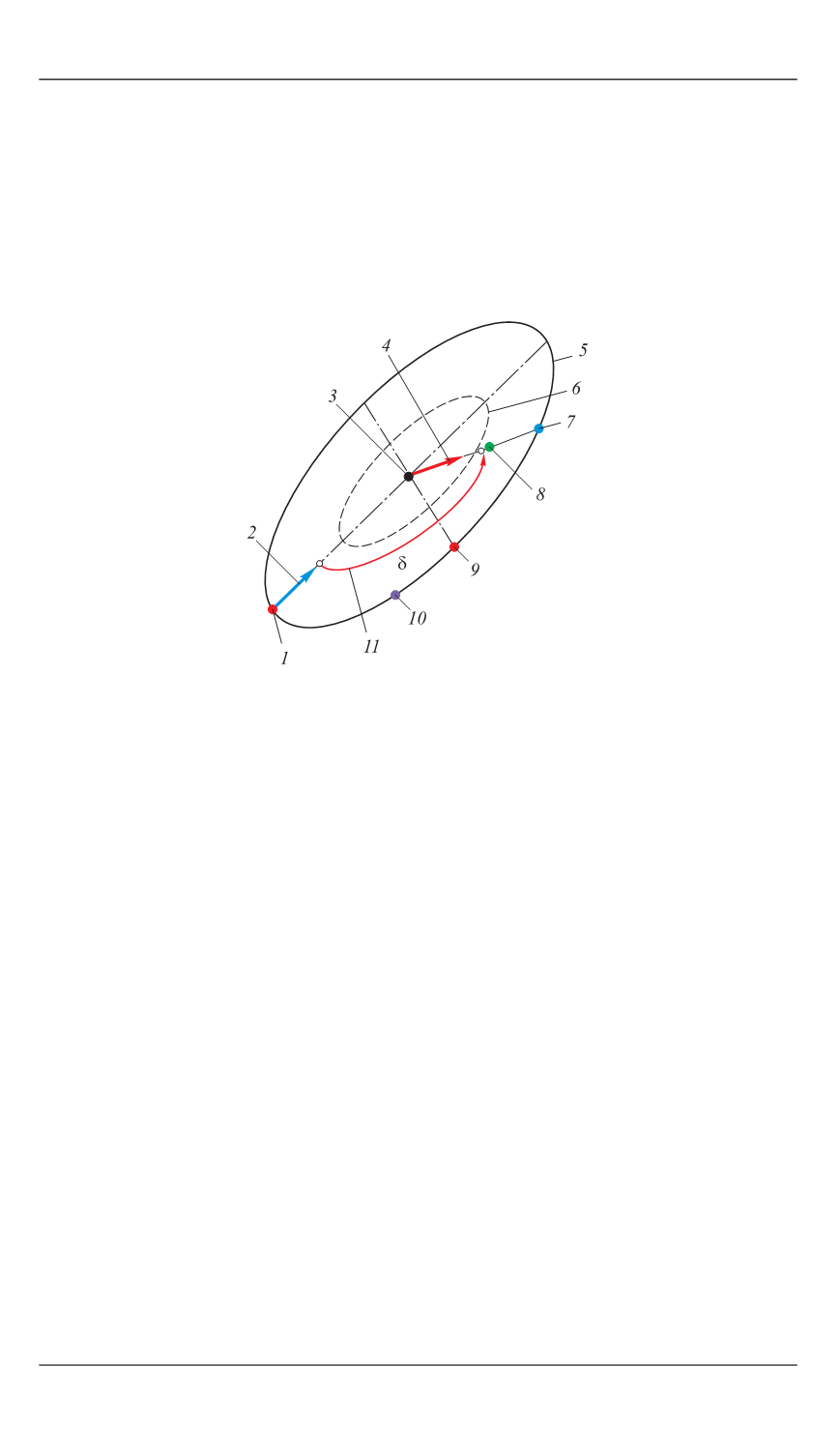
Рис. 3.
Схема терминального алгоритма наведения (ЗМ — зона ма-
невра):
1
— конечная точка для γ = 180°;
2
— горизонтальная проекция вектора скоро-
сти;
3
— прогнозируемый центр ЗМ на
i
-м шаге управления;
4
— требуемое
направление движения центра ЗМ;
5
— граница ЗМ на
i
-м шаге управления;
6
—
граница зоны нечувствительнсти на
i
-м шаге управления;
7
— конечная точка
для требуемого командного крена на
i
-м шаге управления;
8
— прицельная точ-
ка;
9
— конечная точка для γ = γ*;
10
— конечная точка для предельно допусти-
мого угла крена (ограничение по перегрузке);
11
— угловое рассогласование
с продольной осью ЗМ
Оценка точностных характеристик наведения ВА.
Исследование
возможных точностных характеристик комбинированной СУС, исполь-
зующей предлагаемый комплекс алгоритмов, проводилось с помощью
сквозного статистического моделирования этапов спуска корабля с
орбиты искусственного спутника Земли. Учитывалось влияние всех
известных возмущающих факторов (ошибки определения исходной
орбиты, ошибки ориентации, разброс характеристик тормозной
двигательной установки, вариации параметров атмосферы, ошибки
знания аэродинамических характеристик ВА, некомпенсированный
момент крена ВА и др.). В ходе исследований сформулированы
требования к автомату стабилизации ВА в канале крена. Модели-
рование проводилось с использованием модернизированного програм-
мно-математического комплекса баллистико-навигационного обеспече-
ния реальных спусков транспортных кораблей «Союз ТМА-М» [11].