














 8 / 12
8 / 12

С.И. Кудрявцев
8
Инженерный журнал: наука и инновации
# 3
2016
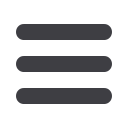
Изменение параметров наведения для одной из случайных реализа-
ций во времени показано на рис. 7–9. Изменение угла крена ВА проис-
ходит по кратчайшему пути с использованием алгоритма стабилизации,
оптимального по быстродействию. При этом уменьшается влияние
инерционности разворотов, особенно заметное на высотах менее 15 км.
Рис. 7.
Пример реализации изменения угла крена ВА при терминальном наведении:
1
— начало терминального наведения;
2
— текущий крен;
3
— командный крен
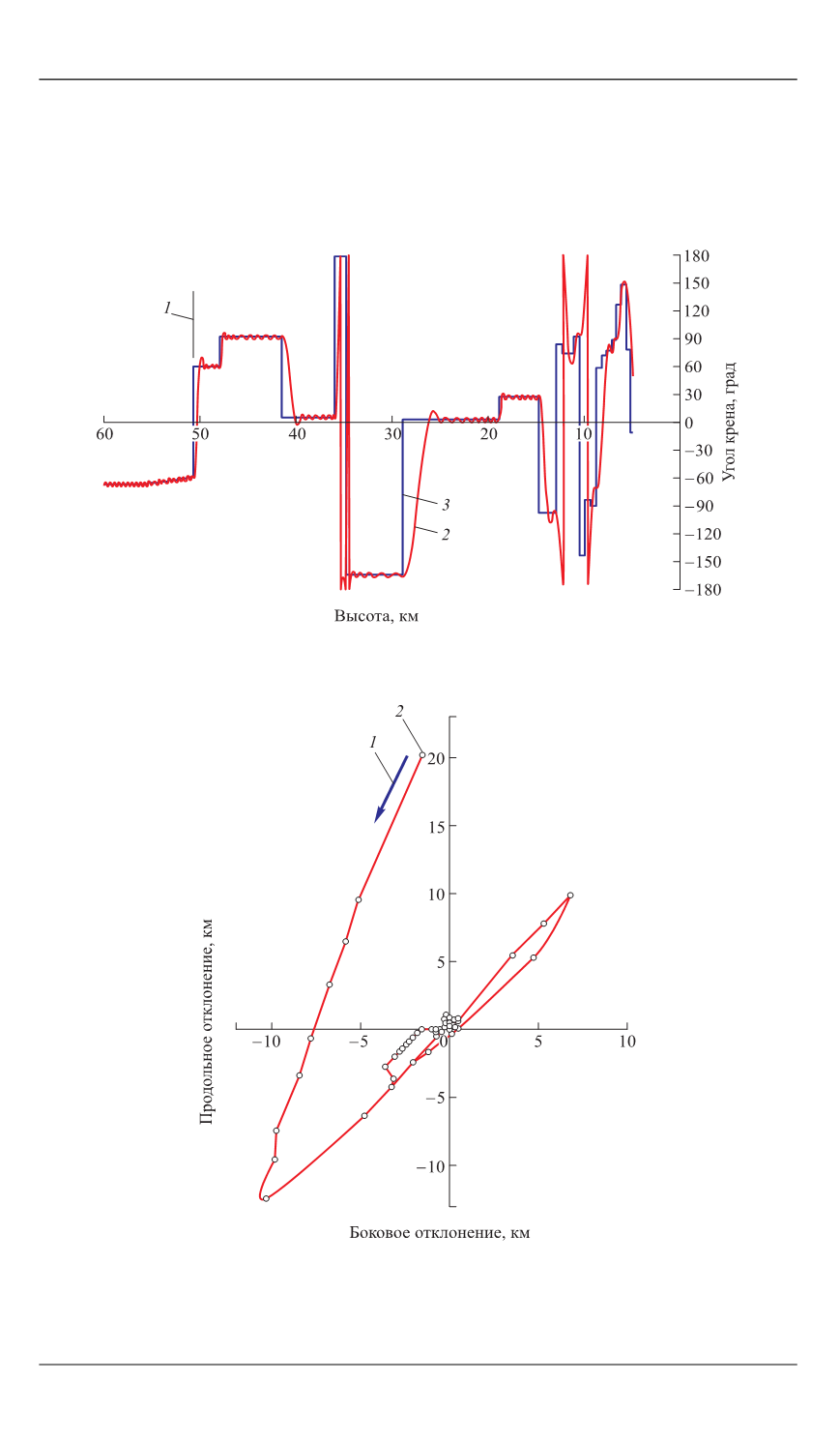
Рис. 8.
Пример реализации траектории движения прогнози-
руемого в алгоритме наведения центра зоны маневра ВА:
1
— направление движения прогнозируемого центра зоны маневра;
2
— начало терминального наведения (высота 48 км)