














 2 / 12
2 / 12

С.И. Кудрявцев
2
Инженерный журнал: наука и инновации
# 3
2016
комбинированной СУС [5]. Предполагается, что на начальном участке
спуска в плотных слоях атмосферы управление движением
осуществляет автономная СУС, построенная на основе принципа
управления относительно опорной траектории (аналогично СУС
эксплуатируемых в настоящее время кораблей «Союз ТМА-М» [6]).
Решение задачи навигации на этом этапе обеспечивает инер-циальная
навигационная система (ИНС). При достаточной простоте алгоритма
управления в этом случае выполняются основные фазовые ограничения
(по тепловому и перегрузочному режимам). На высотах меньше 45–48
км для управления используется терминальное наведение по
информации от спутниковой навигационной системы. Данные
аппаратуры спутниковой навигации (АСН) используются для коррек-
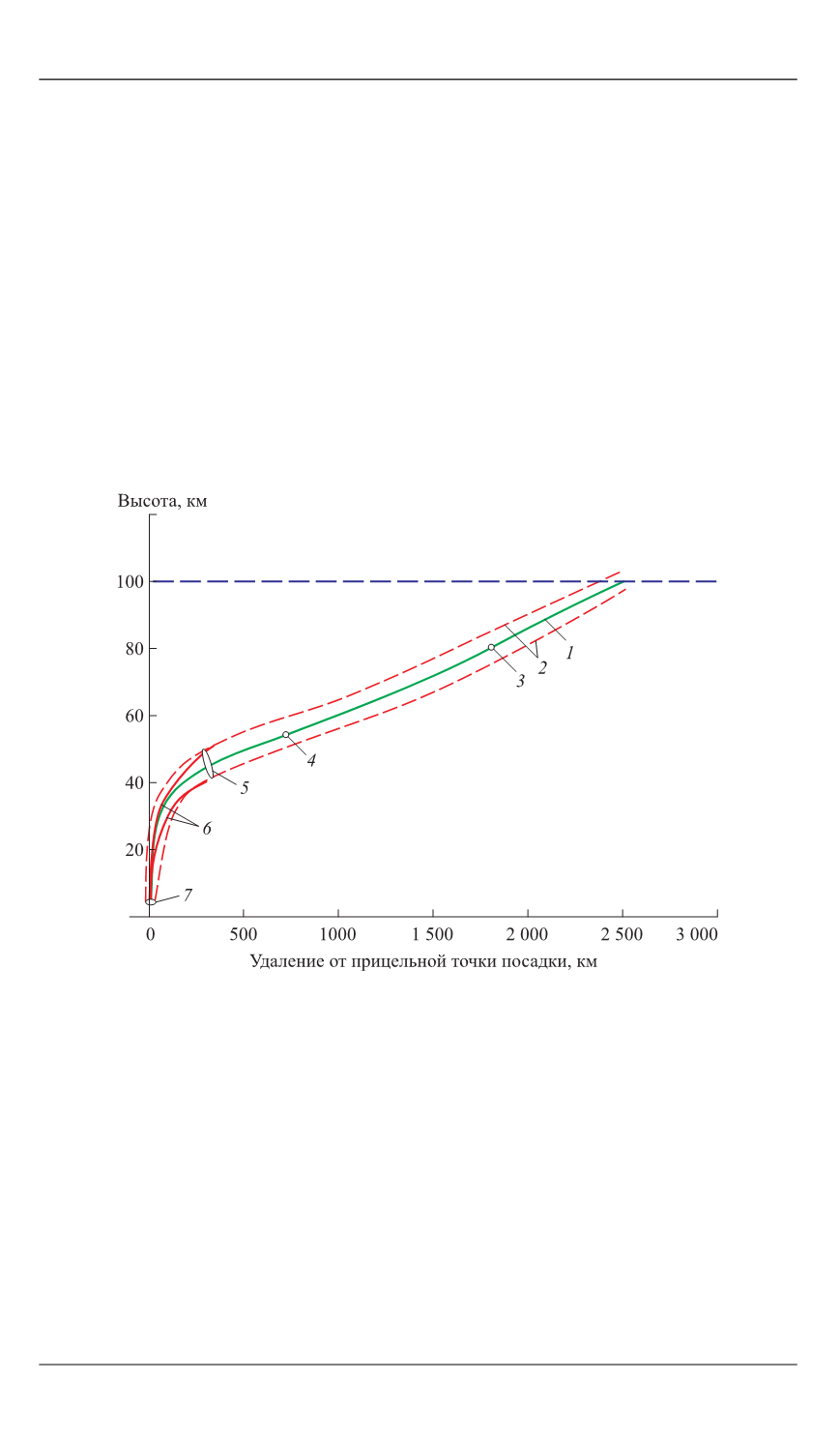
ции ИНС. Этапы работы комбинированной СУС показаны на рис. 1.
Рис. 1.
Этапы работы комбинированной системы управления спуском:
1
— номинальная траектория;
2
— границы трубки возмущенных траекторий
при автономном наведении;
3
— начало участка автономного наведения с ис-
пользованием ИНС;
4
— смена угла крена для обеспечения заданной боковой
дальности;
5
— начало конечного участка наведения с использованием
ИНС + АСН;
6
— границы трубки возмущенных траекторий конечного участка;
7
— начало работы СМП
Задача наведения ВА в прицельную точку на конечном участке
спуска, начало которого соответствует моменту гарантированного
восстановления радиосвязи с навигационными спутниками (на высо-
те 45–48 км) [7] и возможности использования информации от АСН,
должна решаться с помощью комплекса бортовых алгоритмов тер-
минального наведения.