














 9 / 11
9 / 11

Аппаратные решения по повышению качества процессов…
9
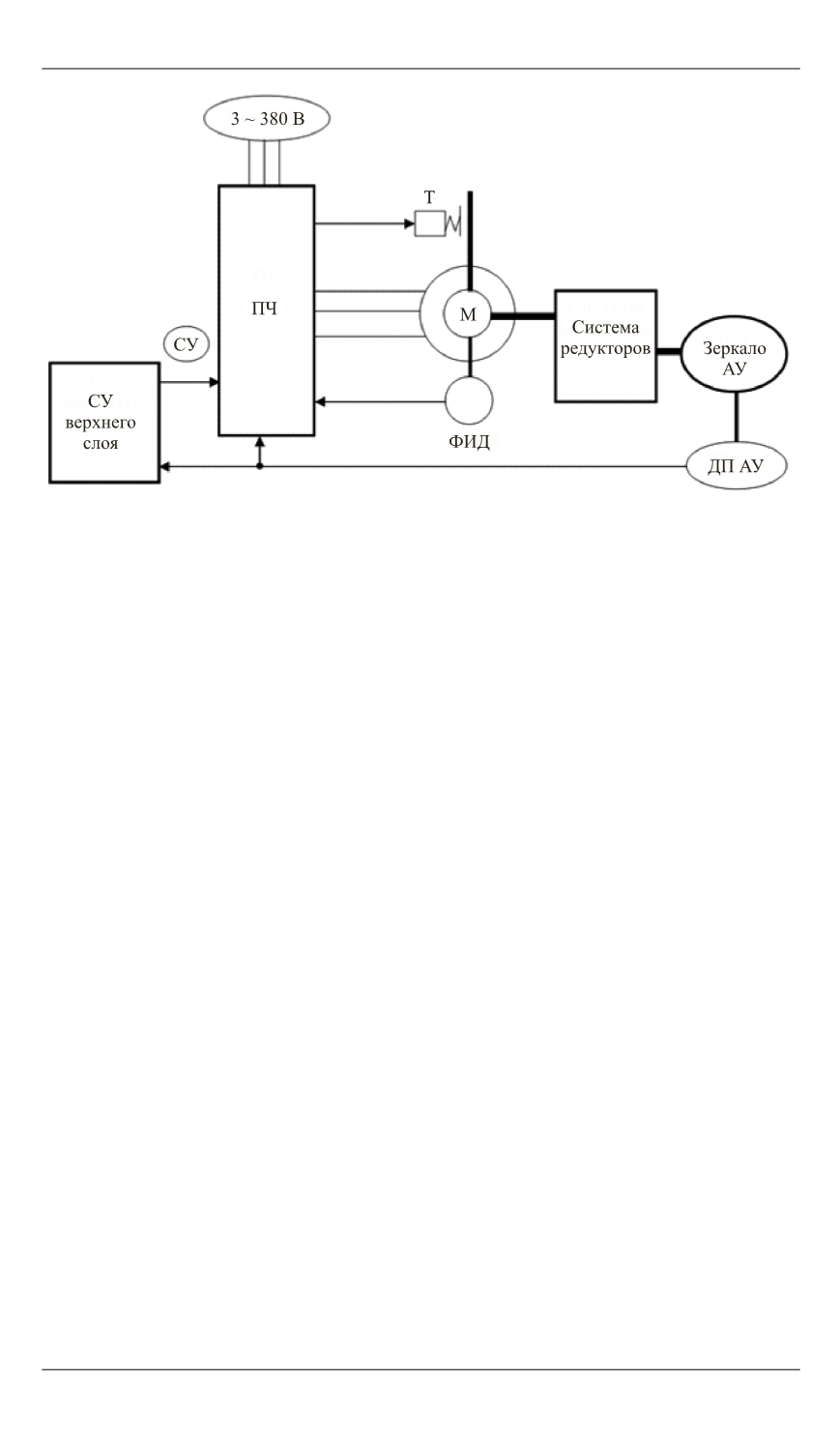
Рис. 6.
Функциональная схема привода:
СУ — сигнал управления по скорости или положению, поступающий от системы управле-
ния верхнего уровня (может подаваться в трех видах: аналоговый сигнал, цифровое задание
по интерфейсу RS-482, импульсное задание); Т — электромагнитный тормоз; М — соб-
ственно электродвигатель; ФИД — фотоимпульсный датчик на валу двигателя; ДП АУ —
датчик положения на оси антенной установки; ПЧ — преобразователь частоты
Заключение.
Модернизация радиотелескопа РТ-7.5 обеспечила
соответствие системы наведения новым требованиям и позволила
расширить его функциональность. В основу принятых технических
решений положены возможности, предоставляемые современным
уровнем развития мехатронной техники — двигателей, преобразова-
телей, датчиков. Следует выделить несколько основных решений, ко-
торые могут быть также применены при модернизации аналогичных
радиотелескопов с устаревшей системой приводов:
замена двигателей постоянного тока с управлением от элек-
тромашинных усилителей на современные специализированные
асинхронные двигатели с управлением от векторных преобразовате-
лей частоты;
отказ от двухдвигательной схемы привода каждой оси с гро-
моздким предварительным редуктором и переход на однодвигатель-
ную схему с диапазоном регулирования скорости 10 000 с компакт-
ным одноступенчатым редуктором;
использование на осях антенной установки современных циф-
ровых датчиков.
Испытания модернизированного радиотелескопа подтвердили пра-
вильность принятых технических решений и соответствие модернизи-
рованной системы управления предъявляемым требованиям [3].