














 3 / 11
3 / 11

Аппаратные решения по повышению качества процессов…
3
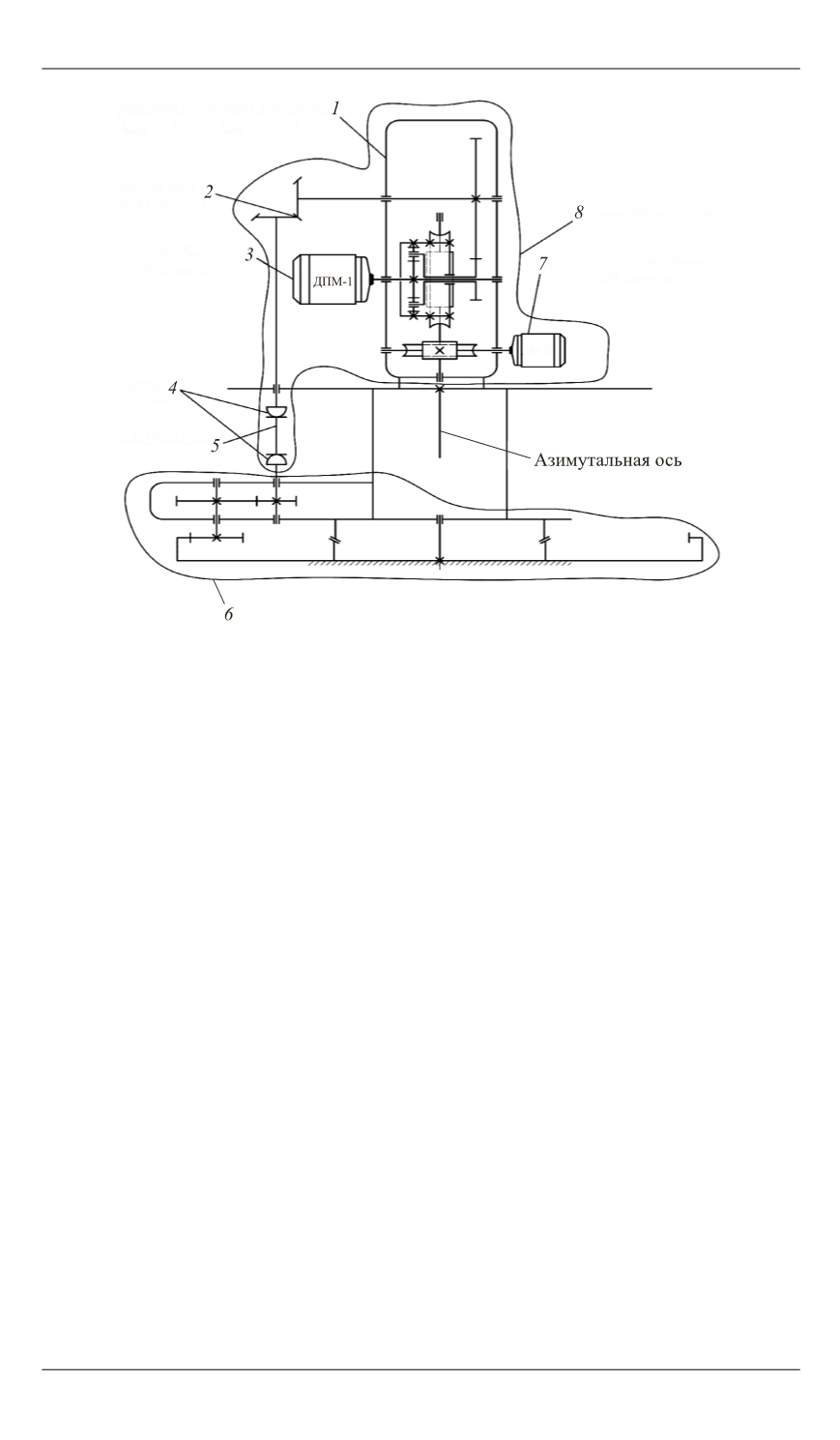
Рис. 2.
Кинематическая схема механической трансмиссии азимуталь-
ной степени подвижности до модернизации:
1
— дифференциальный редуктор (
i
быстр
= 2,46,
i
медл
= 440,47);
2
— коничес-
кая передача (
i
= 1);
3
,
7
— двигатели соответственно быстрого и медленного
движения;
4
— шарниры Кардана;
5
— карданный вал;
6
— редук-
тор(
i
= 721,5);
8
— заменяемый узел
показал, что наиболее критическими звеньями являются первичные
дифференциальные редукторы обеих степеней подвижности с тремя
ступенями редукции с зубчатыми колесами с невысоким классом
точности. Все зубчатые колеса закреплены на валах посредством
шпоночных соединений, таким же способом соединены с редуктором
и выходные валы электродвигателей.
Поскольку приводы работали в составе следящих систем и имели
частые реверсы, шпоночные соединения быстро изнашивались и тре-
бовали замены, что приводило к временному прекращению работы
антенной установки. В этом заключался основной недостаток суще-
ствовавшей системы приводов.
Функциональная схема системы управления мехатронного моду-
ля наведения на примере угломестной оси представлена на рис. 3.
В состав системы управления входят: усилительно-преобразующее
устройство, двигатель, система редукторов, нагрузка и датчик поло-
жения. Нагрузкой для привода азимутальной оси является азимуталь-
ная платформа, для привода по угломестной оси — зеркало антенной
установки.