














 2 / 11
2 / 11

В.А. Польский, Ю.И. Рассадкин, А.В. Синицын
2
Динамические характеристики системы приводов
Режим
наведения
Параметр
До модернизации
После
модернизации*
Азимут
Угол места
Программное
Скорость, угл. с/с
0–205
0–325
2,5–9 000
Ускорение, угл. с/с
2
0–20,5
0–32,5
0–36
Ошибка наведения, угл. с < 10
< 10
< 2,5
Полуавтомати-
ческое и регла-
ментное
Скорость медленного
движения, угл. с/с
3–205
3–325
2,5–9 000
Скорость быстрого дви-
жения, угл. с/с
0–18 000
0–18 000
20–18 000
Ускорение медленного
движения, угл. с/с
2
0–20,5
0–32,5
0–36
Ускорение быстрого
движения, угл. с/с
2
0–1 800
0–1 800
0–1 800
*Требуемые технические характеристики системы мехатронных модулей имеют одина-
ковые значения для азимута и угла места.
Конструкция системы приводов до модернизации радиотеле-
скопа.
Движение антенной установки по каждой оси вращения осу-
ществлялось двухдвигательным электроприводом с механическим
дифференциалом на базе двигателей постоянного тока, управляемых
от электромашинных усилителей. Для передачи движения от двига-
телей к соответствующим осям вращения зеркала (угломестной и
азимутальной) использовались механические трансмиссии (рис. 1, 2).
Анализ кинематических схем (см. рис. 1, 2) и результатов прове-
денного технического обследования механических трансмиссий
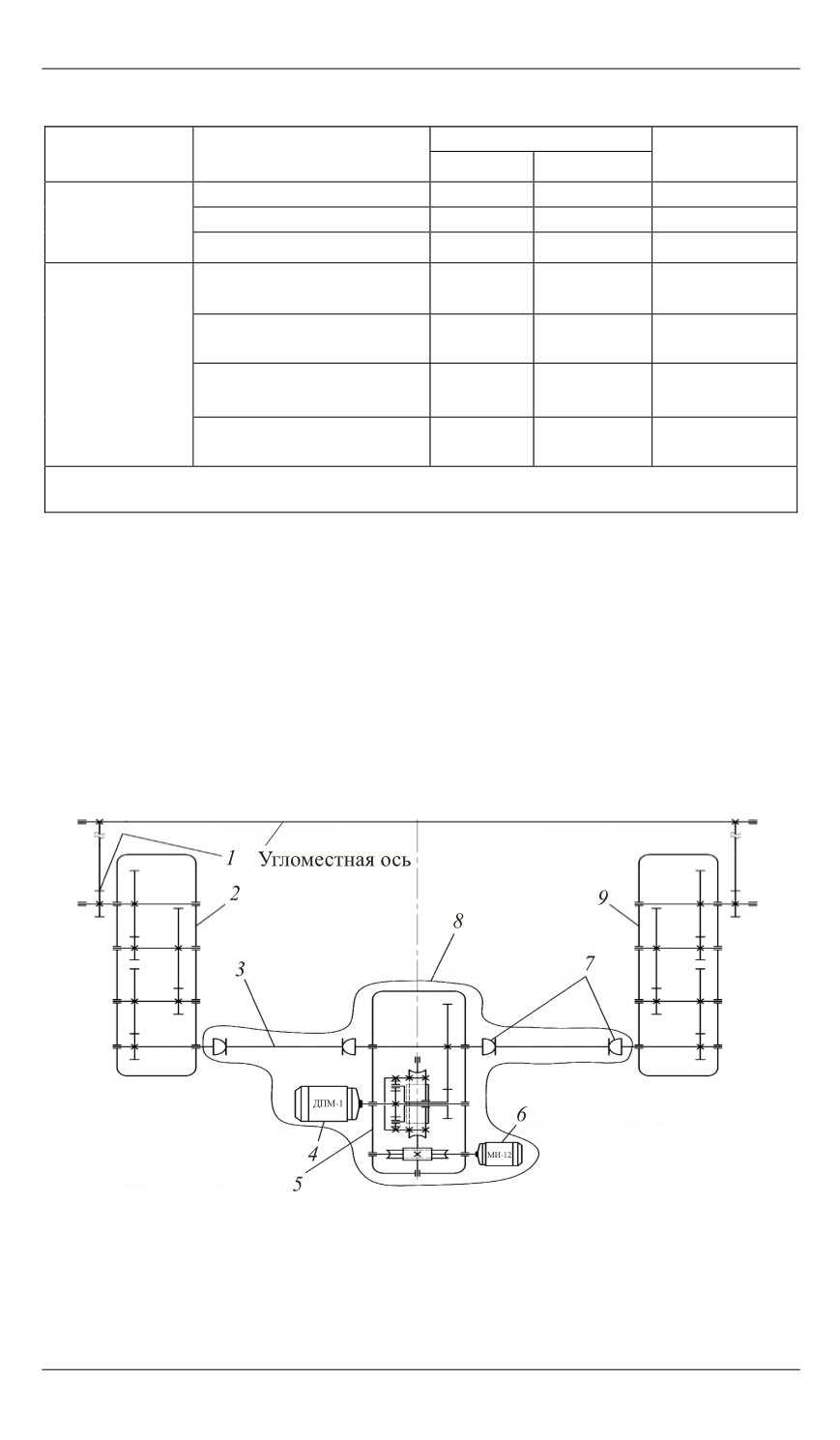
Рис. 1.
Кинематическая схема механической трансмиссии угломест-
ной степени подвижности до модернизации:
1
— открытая передача (
i
= 20,5);
2
,
9
— левый и правый редукторы (
i
= 22);
3
— карданный вал;
4
,
6
— двигатели быстрого и медленного движения соот-
ветственно;
5
— дифференциальный редуктор (
i
быстр
= 2,46,
i
медл
= 440,47);
7
— шарниры Кардана;
8
— заменяемый узел