К анализу систем ориентации деформируемых космических аппаратов
11
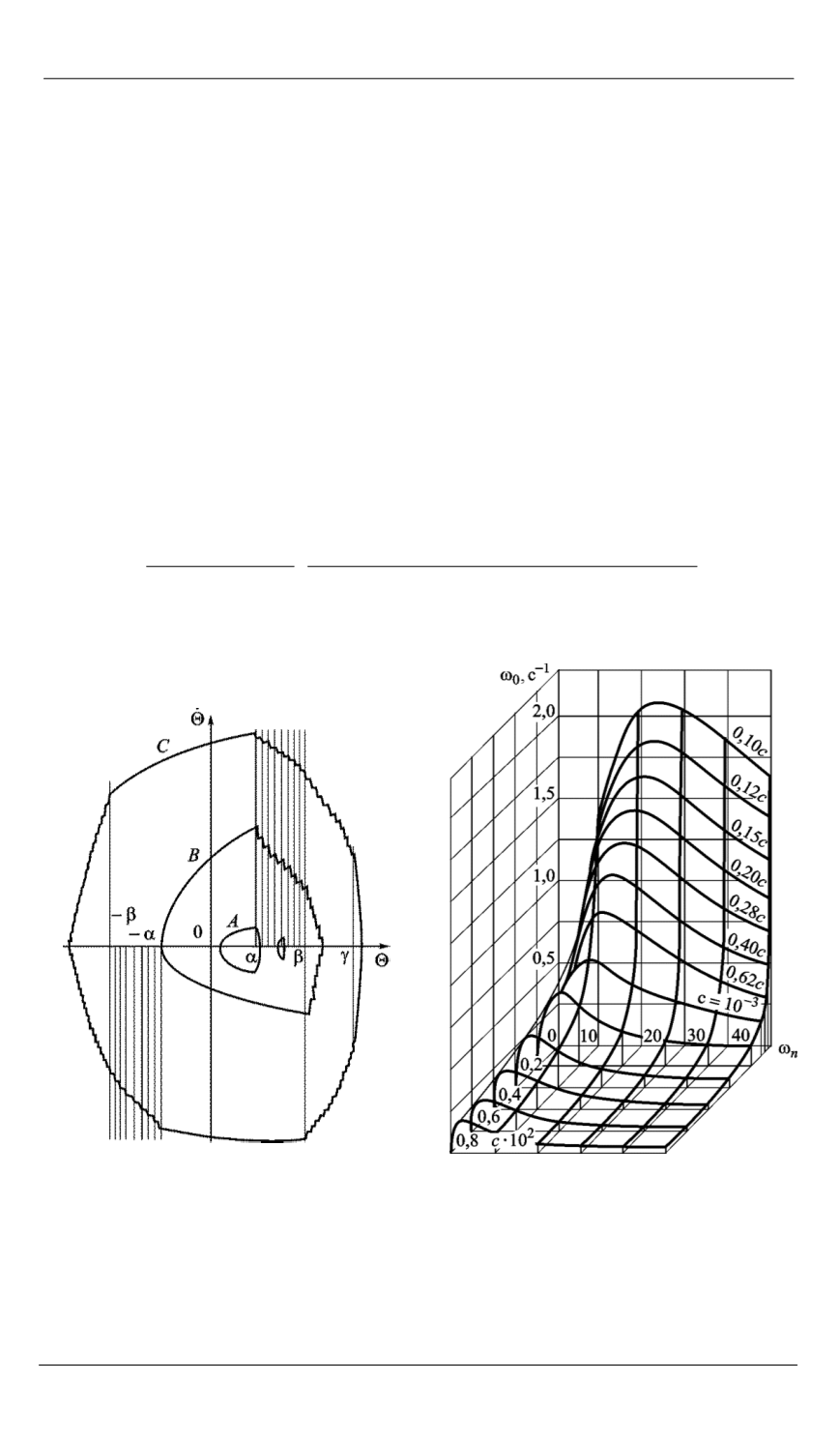
В качестве примера представлены полученные с помощью фазо-
вых аналитических функций последования устойчивые предельные
циклы (A; B; C) с различным числом переключений для гипотетиче-
ского квазитвердого аппарата (рис. 4).
Для гипотетического аппарата с характеристиками, указанными
выше, применительно к одноимпульсному предельному циклу типа
А (см. рис. 4) на рис. 5 представлены области устойчивого функцио-
нирования системы управления ориентацией с учетом упругих коле-
баний, где использованы обозначения:
n
— частота определяющего
тона упругих колебаний ВЭ;
C
— параметр размаха угловых колеба-
ний КА из-за поперечных колебаний ВЭ. Частота колебаний ква-
зитвердого аппарата
2
п в
0
2
2
п
в 0
п
0
в 0
2
.
2(
)
2 (
/ 4)
2 /
n
n
n
n
M M
M M I C M k
I
k M I
(26)
Пространство под поверхностью рельефа, изображенного на
рис. 5, является областью допустимых значений параметров управле-
ния ДКА. Пространство над рельефом является областью возможных
Рис. 4
Рис. 5


