Г.П. Колесникова, А.М. Формальский
8
Представленные исследова-
ния проведены в рамках государ-
ственного контракта от 3 нояб-
ря 2011 г. № 07.524.11.4012 «Раз-
работка программно-аппаратно-
го комплекса дублирования опор-
но-двигательного аппарата чело-
века «ПАК «Экзоскелетон».
ЛИТЕРАТУРА
[1]
Богданов В.А., Гурфинкель В.С.
Биомеханика локомоций человека. В кн.:
Физиология движений
. Ленинград, Наука,
1976, с. 276–315.
[2]
Формальский А.М.
Перемеще-
ние антропоморфных механизмов
. Мос-
ква, Наука, 1982, 362 с.
[3]
Белецкий В.В.
Двуногая ходьба: модельные задачи динамики и управле-
ния
. Москва, Наука, 1984, 288 с.
[4]
Ирвинг П. Герман.
Физика организма человека
. Долгопрудный: издатель-
ский дом «Интелект», 2011, 992 с.
[5]
Капанджи А.И.
Функциональная анатомия. Нижняя конечность. Т. 2.
Москва, ЭКСМО, 2010, 352 с.
[6]
Бернштейн Н.А.
Физиология движений и активность
. Москва, Наука,
1990, с. 373–392.
[7]
Витензон А.С.
Закономерности нормальной и патологической ходьбы че-
ловека
. Москва, ООО «Зеркало-М», 1998, 271 с.
Статья поступила в редакцию 05.02.2014
Ссылку на эту статью просим оформлять следующим образом:
Колесникова Г.П., Формальский А.М. Об одном способе моделирования по-
ходки человека.
Инженерный журнал: наука и инновации
, 2014, вып. 1.
URL:
Колесникова Галина Петровна
— преподаватель Финансового университета
при Правительстве Российской Федерации. Область научных интересов: теория
управления, теория оптимизации, теория управления ходьбой, робототехника, ме-
хатроника, биомеханика. е-mail:
Формальский Александр Моисеевич
— д-р физ.-мат. наук, профессор, член
Российского национального комитета по теоретической и прикладной механике,
лауреат премий им. М.В. Ломоносова МГУ и им. А.А. Андронова РАН, главный
научный сотрудник Научно-исследовательского института механики МГУ
им. М.В. Ломоносова. Область научных интересов: теория управления, теория оп-
тимизации, теория управления с использованием информации об усилиях, теория
управления ходьбой, теория управления манипуляторами с податливыми звеньями,
робототехника, мехатроника, биомеханика.
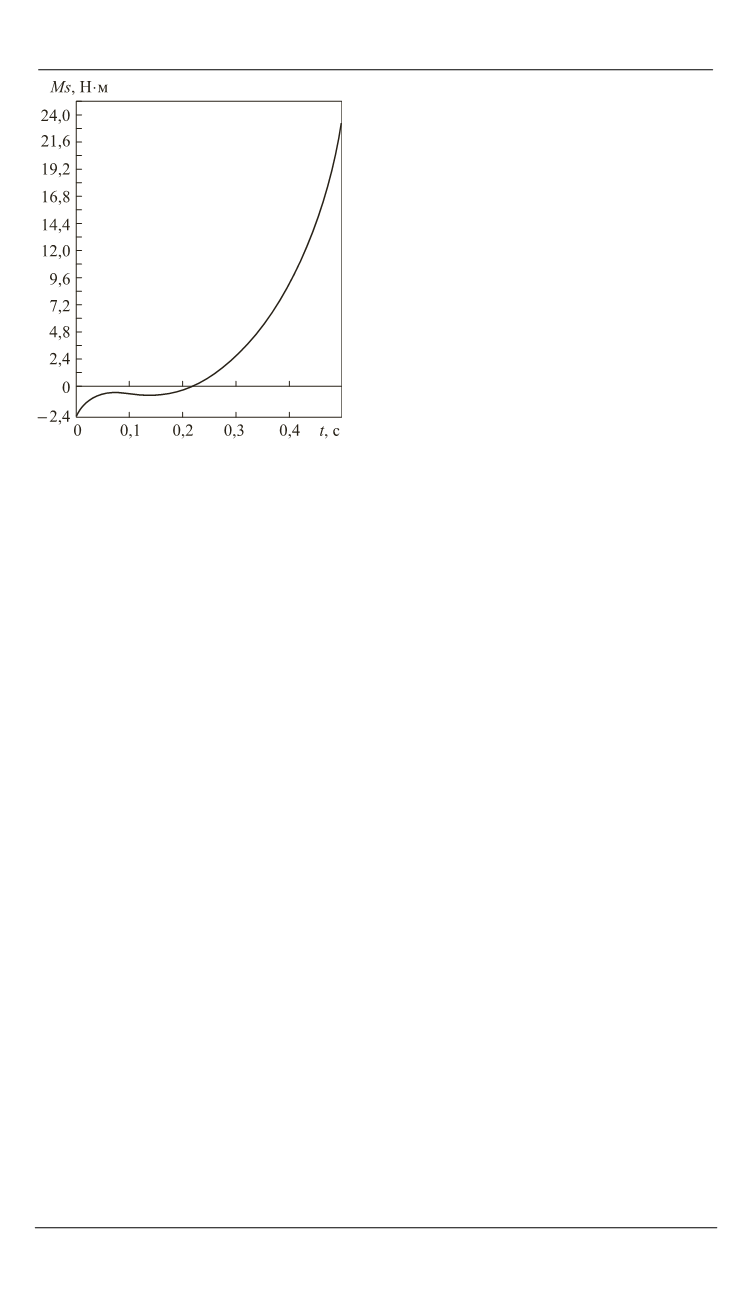
Рис. 10.
Момент
Ms
в голеностоп-
ном суставе опорной ноги


