Г.П. Колесникова, А.М. Формальский
6
или
ch( ) ch(
)
( )
0
.
1 ch( )
t
T t
t
T
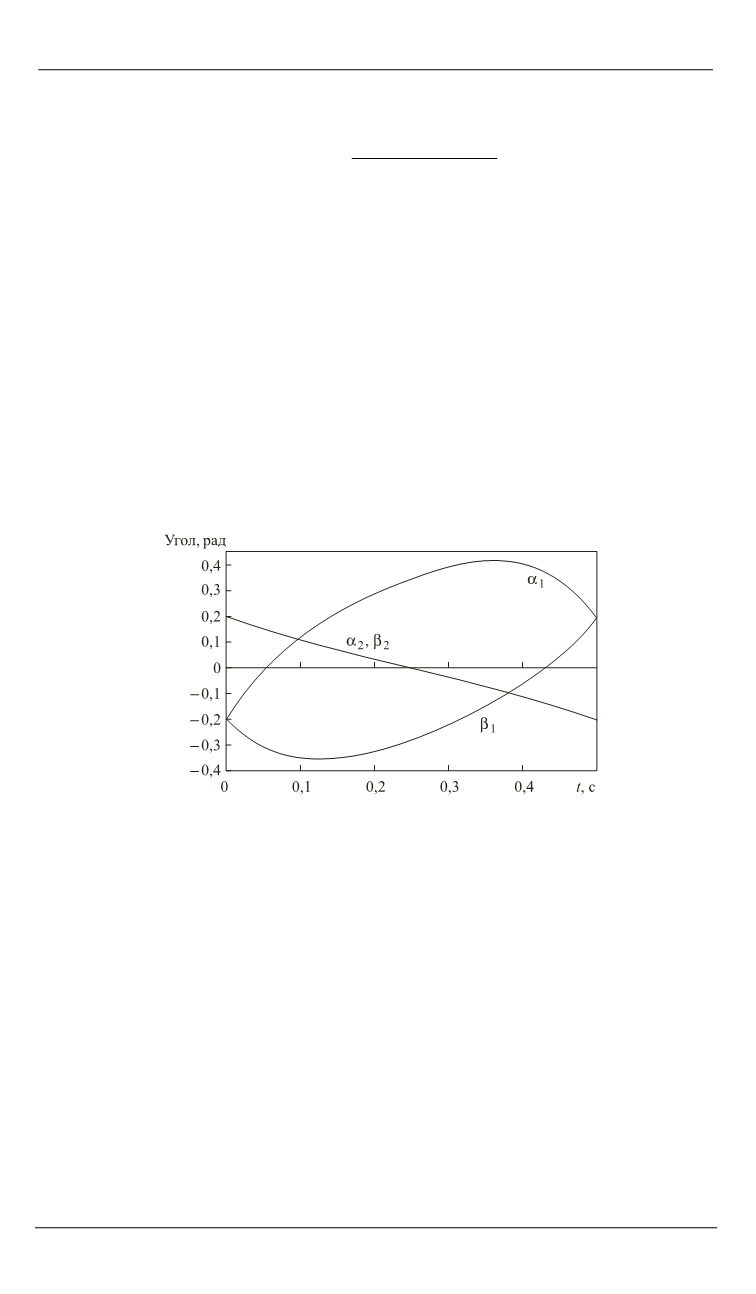
Результаты моделирования.
В настоящем параграфе представ-
лены результаты моделирования обычной ходьбы человека при сле-
дующих физических параметрах [2]: масса корпуса — 75 кг, массы
бедра и голени — 8,6 и 4,6 кг соответственно; высота корпуса —
0,386 м, длина бедра и голени — 0,41 и 0,497 м соответственно.
Функции углов опорной и переносимой ног (рис. 4):
2
3
4
5
1 1
2
3
4
5
2
2
3
4
5
2
0,198 0,945 +0,954 – 1, 508 0, 710 0,568 ,
0,198 4, 546 17,540 45, 266 53,113 5, 413 ,
0,198 3, 036 18, 534 38, 374 30, 526 5, 413 .
t
t
t
t
t
t
t
t
t
t
t
t
t
t
t
Рис. 4.
Графики изменения углов опорной
(
1 1
,
) и переносимой (
2 2
,
) ног
При решении прямой задачи динамики на основании уравнений
(1) были вычислены реакция в точке
O
опорной ноги и моменты, раз-
виваемые при движении в тазобедренном, коленном и голеностопном
(опорная нога) суставах (рис. 5–10).
Представленные расчеты достаточно близки данным, получен-
ным в результате исследований физиологии ходьбы человека [4, 5, 7],
что и являлось целью настоящего исследования.


