Об одном способе моделирования походки человека
5
5
0
( )
,
j
i
ij
j
f t
a t
1,..., 4.
i
При вычислении коэффици-
ентов
a
ij
согласно описанным
выше алгоритмам были опреде-
лены абсолютные координаты
точек
B
и
D
для шести момен-
тов времени. Для этого отрезок
времени
T
выполнения одного
шага был поделен на шесть рав-
ных частей так, что
k
t
1
,
k
t
t
где
1,..., 6,
k
,
6
T t
0
0.
t
Далее на основа-
нии формул планиметрии были
получены значения α
1
, α
2
, β
1
, β
2
в эти моменты времени при
условиях, что
1 1
и
2 2
.
Моделирование движения корпуса
AD
в одноопорной фазе
шага.
На значения вычисляемых моментов и реакций достаточно
сильно влияет изменение угла наклона корпуса. Рассмотрим корпус
как опрокинутый маятник с центром масс, находящимся на расстоя-
нии
S
k
от тазобедренного сустава. Тогда уравнение движения корпуса
имеет вид
sin ,
k
где
2
.
k
k
g
s
Поскольку отклонение корпуса от вертикали достаточно мало
(2…4 градуса) [5, 7], то после линеаризации этого уравнения получаем
2
.
k
В результате, при условии
(0) ( )
T
движение корпуса задает-
ся функцией
1
2
( )
,
k
k
t
t
t c e c e
где
1
2
0
(0)
,
,
1
1
k
k
T
T
c
c
e
e
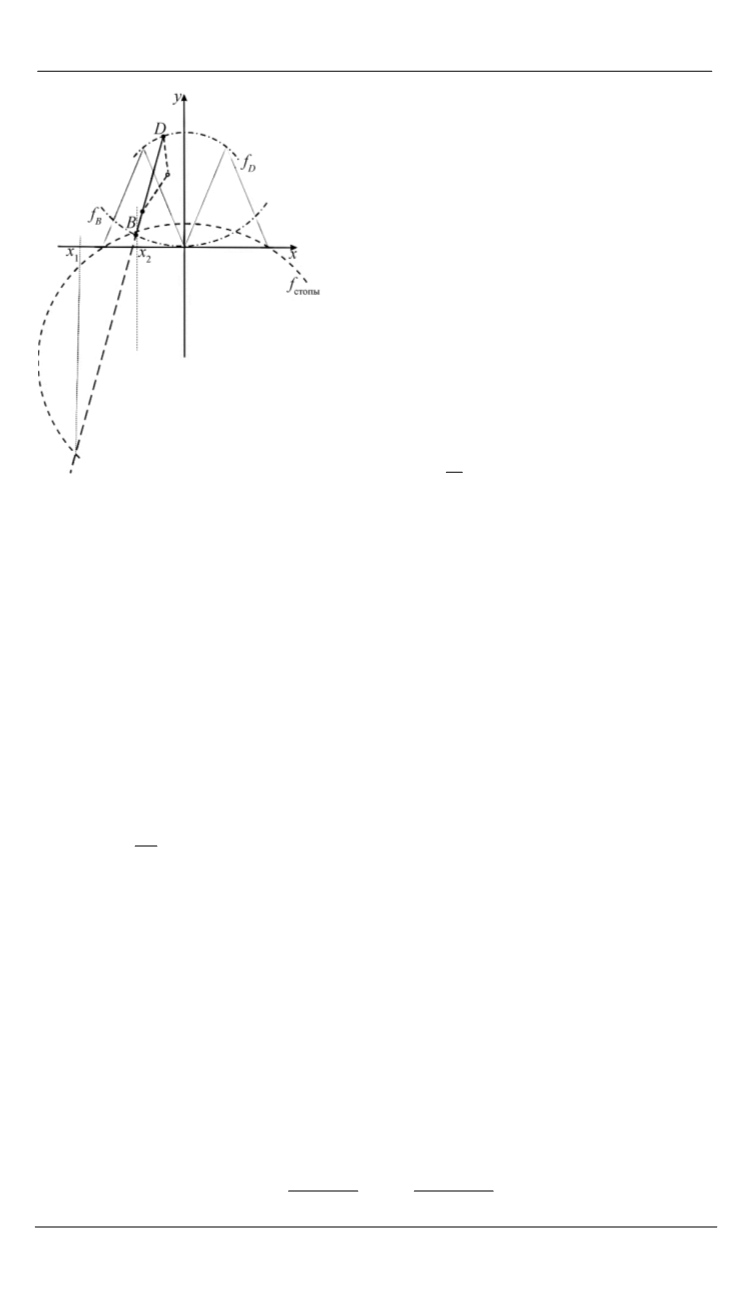
Рис. 3
. Иллюстрация к алгоритму
задания движения конца перено-
симой ноги, точка
B


