Г.П. Колесникова, А.М. Формальский
2
ной плоскости пренебрегаем, поскольку
при ходьбе отклонение центра масс челове-
ка во фронтальной плоскости происходит не
более чем на 2,5 см (корпус человека откло-
няется на 1—2 градуса при росте человека
1,75…2,0 м). Таким образом, при движении
в сагиттальной плоскости рассматривается
одноопорная фаза шага пятизвенного ан-
тропоморфного механизма с пятью степе-
нями свободы (опорная стопа неподвижна).
Математическая модель.
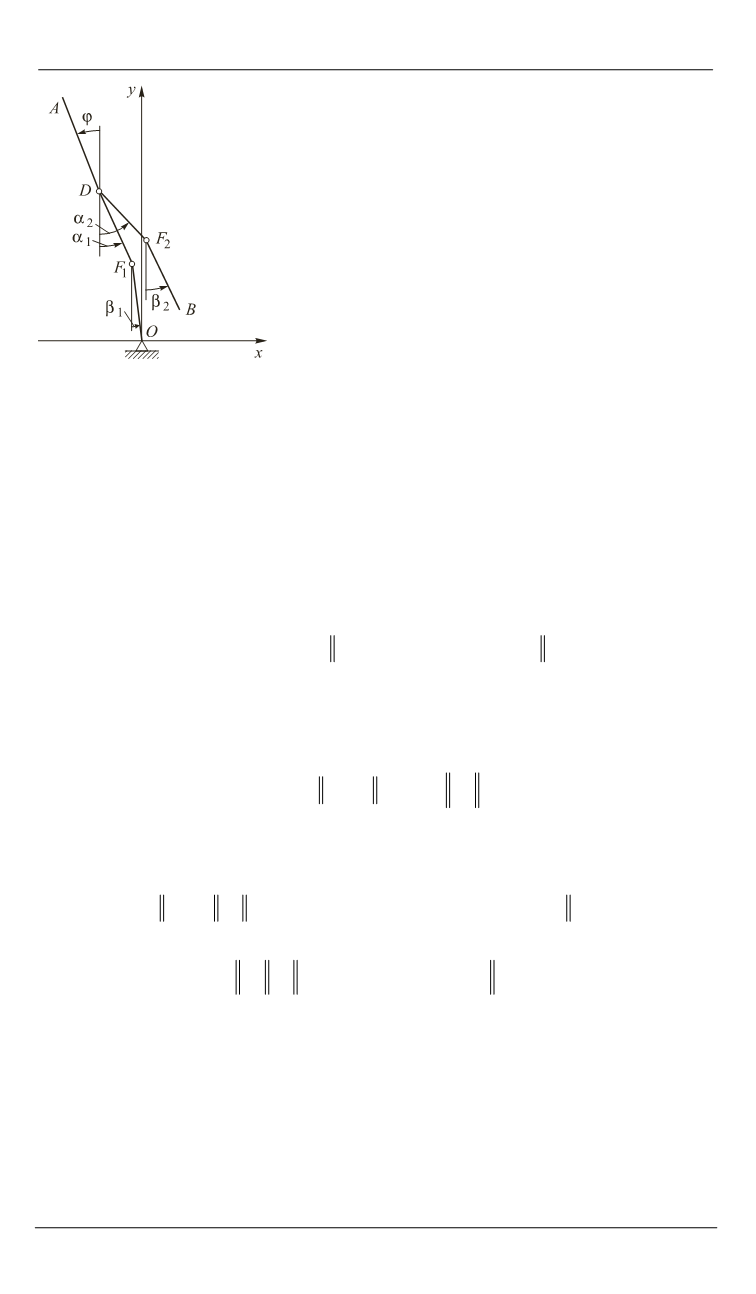
Положение
плоского пятизвенного антропоморфного ме-
ханизма в одноопорной фазе шага однознач-
но задается пятью обобщенными координа-
тами (см. рис. 1): φ — угол отклонения кор-
пуса от вертикали; α
1
и β
1
— углы отклонения от вертикали бедра и го-
лени опорной ноги соответственно; α
2
и β
2
— углы отклонения от вер-
тикали бедра и голени переносимой ноги соответственно. Все углы от-
считываются в положительном направлении — против часовой стрелки.
Для получения уравнений движения плоского пятизвенного ан-
тропоморфного механизма используем уравнения Лагранжа II рода.
Если семимерный вектор
1 2 1 2
,
, , ,
, ,
T
D D
z x y
, где
,
D D
x y
—
координаты тазобедренного сустава
D
, принять за вектор-столбец
обобщенных координат
,
то
уравнения плоского движения пятизвенни-
ка можно записать в матричной форме [2, 3]:
2
( )
sin
( )
( ) ,
i
i
B z z gA z D z z C z w
(1)
где
1
2
1
2
sin
0,1, sin , sin , sin , sin , sin ,
T
i
z
2
2 2 2 2 2
1 2 1 2
0, 0, , , , ,
;
T
i
z
B
(
z
) — матрица кинетической энергии;
gA
— матрица членов, завися-
щих от гравитации (
g
— ускорение свободного падения);
w
— вектор-
столбец 7
7 сил и моментов сил, приложенных к системе, включая су-
ставные моменты в тазобедренных (
Mk
1
,
Mk
2
), коленных (
M
1
,
M
2
) и
голеностопном (
М
s
для опорной ноги) суставах, развиваемые челове-
ком при движении, а также компоненты
R
x
,
R
y
силы реакции опоры в
стопе опорной ноги. Матрицы
B
(
z
),
gA
,
D
(
z
) и
C
(
z
) имеют порядок 7
7.
Рис. 1.
Кинематическая
схема плоского пятизвен-
ного антропоморфного
механизма


