Об одном способе моделирования походки человека
3
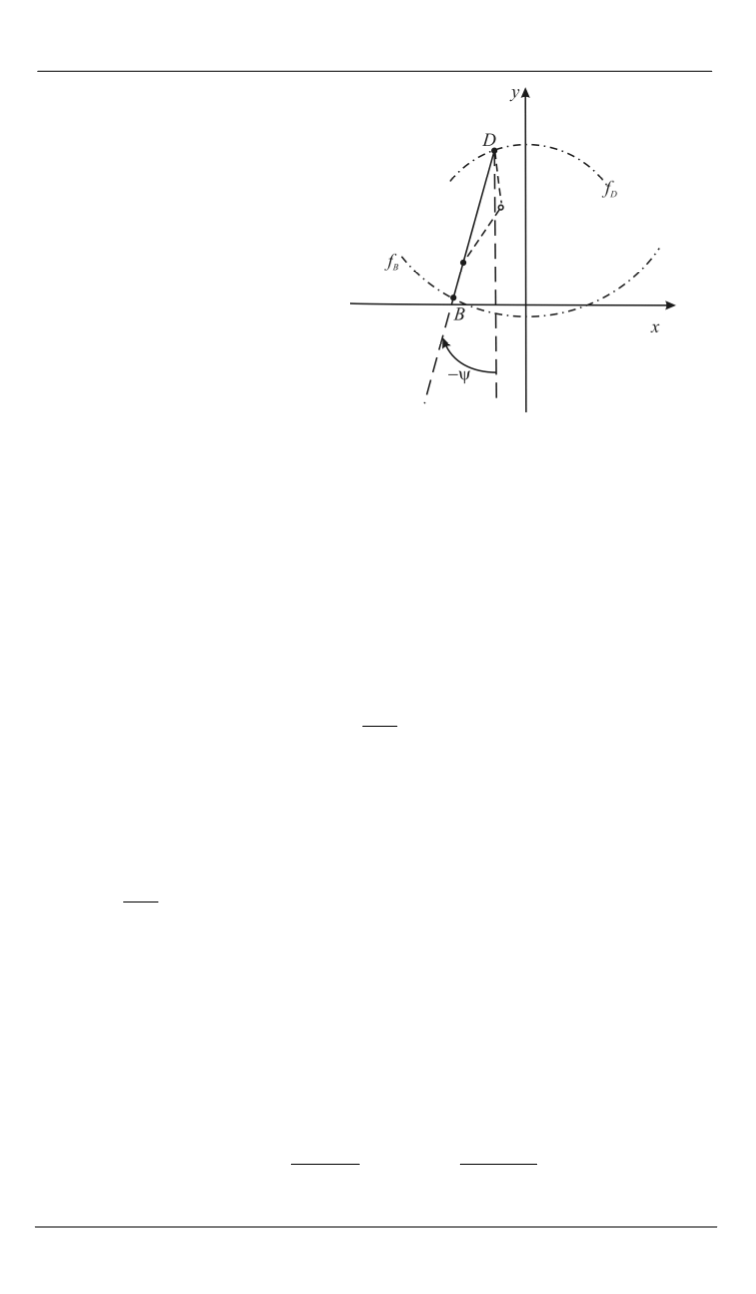
Моделирование шага
человека при ходьбе.
Тра-
ектория и закон движения
тазобедренного
сустава
(точка D) в одноопорной
фазе шага.
Согласно [4, 5],
положения центра масс че-
ловека и тазобедренного су-
става при выполнении шага
практически совпадают и
движутся по подобным тра-
екториям. Также, согласно
[4], в одноопорной фазе шага
опорная нога остается прак-
тически прямой, т. е. точка
D
тазобедренного сустава дви-
жется по части окружности
радиуса, равного сумме длин
бедра и голени (рис. 2, тра-
ектория
D
f
). Будем считать, что уравнение движения точки
D
по
траектории
D
f
представляет собой уравнение движения свободного
перевернутого математического маятника:
sin
g
OD
или, с учетом малости угла
, уравнение
2
,
k
где
2
.
g k
OD
При условиях, что
(0)
( )
T
(где
T
— конечный момент вре-
мени выполнения шага), закон изменения угла
(в линейном при-
ближении) имеет вид
1
2
( )
,
kt
kt
t c e c e
где
1
2
2
2
1
1
0
,
0
.
1
1
kT
kT
kT
kT
e
e
c
c
e
e
Рис. 2.
Моделирование движения точки
B
, где
f
B
— относительная траектория,
являющаяся частью окружности с цен-
тром в точке
D
и радиуса
ВD
, равного
сумме длин голени и бедра ноги человека


