Одновременная стабилизация SIMO-систем
17
0
20
40
60
80
100
120
140
160
180
200
0
10
20
30
40
50
60
70
1
k
2
k
5
=
r
205
=
r
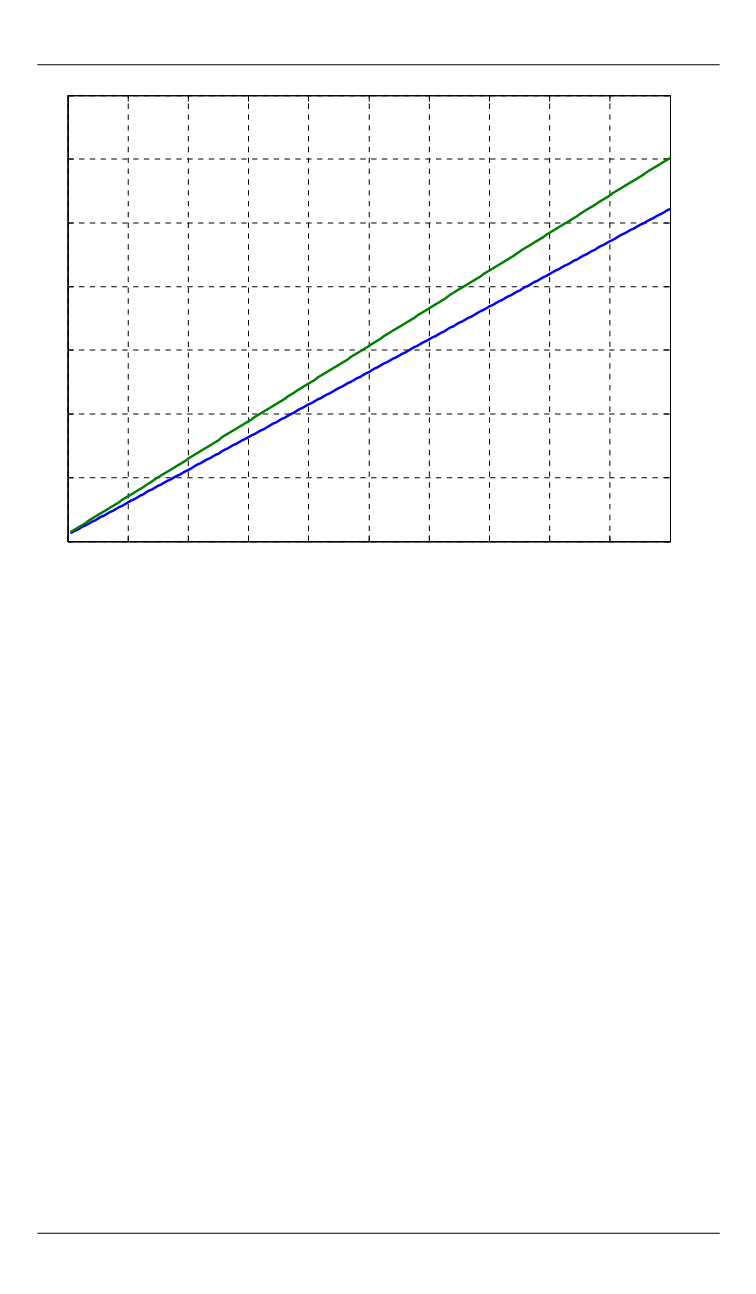
Рис. 4.
Характер изменения параметров стабилизирующего регулятора (II)
ЛИТЕРАТУРА
[1] Поляк Б.Т., Щербаков П.С.
Робастная устойчивость и управление
.
Москва, Наука, 2002.
[2] Мисриханов М.Ш., Рябченко В.Н. Ленточная формула решения задачи
А.Н. Крылова.
Автоматика и Телемеханика
, 2007, № 12, с. 53–69.
[3] Мисриханов М.Ш., Рябченко В.Н. Алгебраические и матричные методы в
теории линейных MIMO-систем.
Вестник ИГЭУ
, 2005, вып. 5, с. 196–240.
Статья поступила в редакцию 28.06.2013
Ссылку на эту статью просим оформлять следующим образом:
Мисриханов М.Ш., Рябченко В.Н., Микрин Е.А., Зубов Н.Е. Одновремен-
ная стабилизация SIMO-систем.
Инженерный журнал: наука и инновации
,
2013, вып. 10. URL:
Мисриханов Мисрихан Шапиевич
— д-р техн. наук, ведущий научный сотруд-
ник научно-технического центра ОАО «РКК ”Энергия“ имени С.П. Королёва». Ав-
тор более 150 работ в области проблем управления космическими аппаратами.
Рябченко Владимир Николаевич
— д-р техн. наук, ведущий научный сотрудник
научно-технического центра ОАО «РКК ”Энергия“ имени С.П. Королёва». Автор
более 200 работ в области проблем управления космическими аппаратами.


