Применение кватернионов в модальном управлении ориентацией …
11
с шагом 5° были поставлены в соответствие начальные условия (5.3)
в виде
[
]
T
н
н
н
1
sin 0, 1, 1, 1 ,
2 3
20
град/с.
3
ϑ
=
=
Λ
ω
(5.6)
Для каждого набора начальных условий (5.6) согласно критерию
(5.4) определялось время ПП
T
ПП
при различных значениях парамет-
ра
a
∈
[–3; 0), после чего с точностью 0,001 находилось оптимальное в
смысле (5.5) значение данного параметра
a
=
a
opt
, которому соответ-
ствует минимальная величина
T
ПП
=
T
ПП min
. В результате были по-
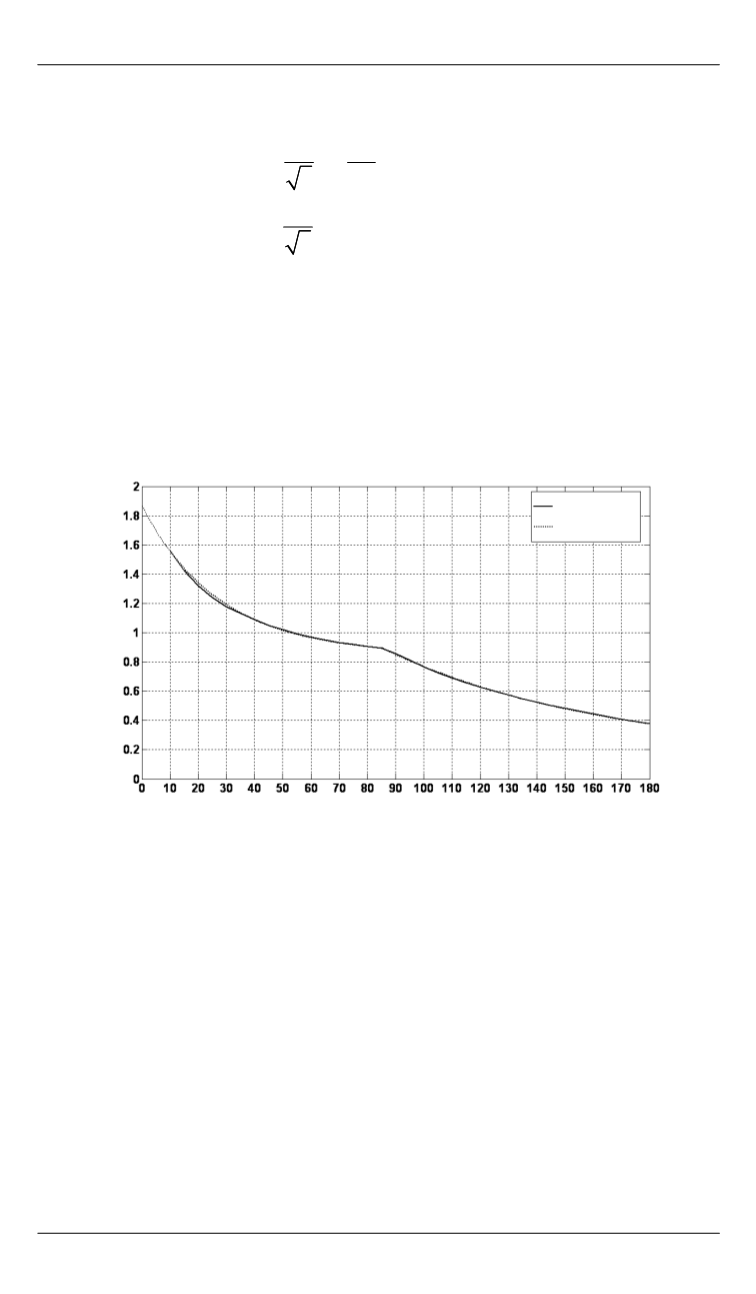
строены графики эмпирических зависимостей
ã
opt
(
ϑ
н
) (рис. 1, эталон)
и
T̃
ПП min
(
ϑ
н
) (рис. 2).
н
, град
ϑ
opt
a
−
эталон
приближение
Рис. 1.
Оптимальные значения параметра
a
при различных
начальных условиях
На полученных графиках можно выделить два участка по аргу-
менту
ϑ
н
: до 85° и после 85°. Это обусловлено тем, что на ПП накла-
дывались два ограничения (5.5) — по модулю угловой скорости и по
ее градиентам. Для первого участка определяющим является ограни-
чение по градиентам угловой скорости, а для второго участка — по
модулю.
Предлагается эмпирическую зависимость
ã
opt
(
ϑ
н
) на каждом из
указанных участков аппроксимировать показательной функцией вида
f
(
x
) =
A
exp(
α
x
) +
B
. Такая аппроксимация была произведена в среде
Matlab для первого участка по точкам с абсциссами 10, 45 и 85°, для
второго участка — по точкам 85, 135 и 180°. В результате была полу-
чена аналитическая зависимость


